

キリが良いですね。
今日こそ完成させます。
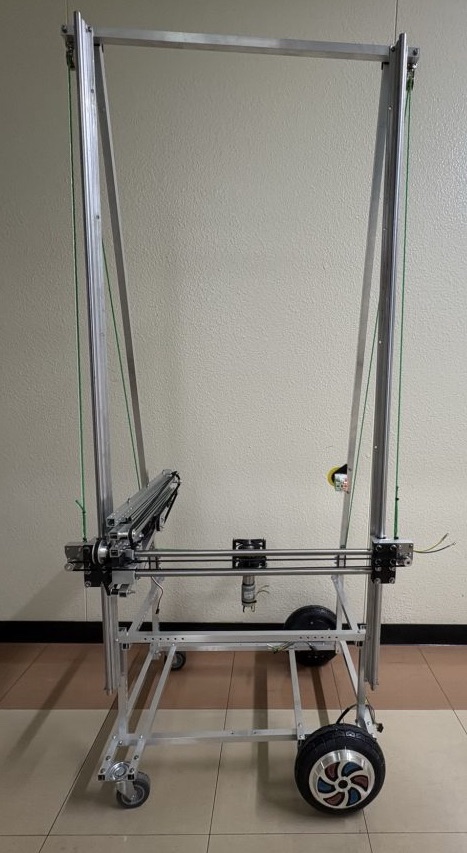
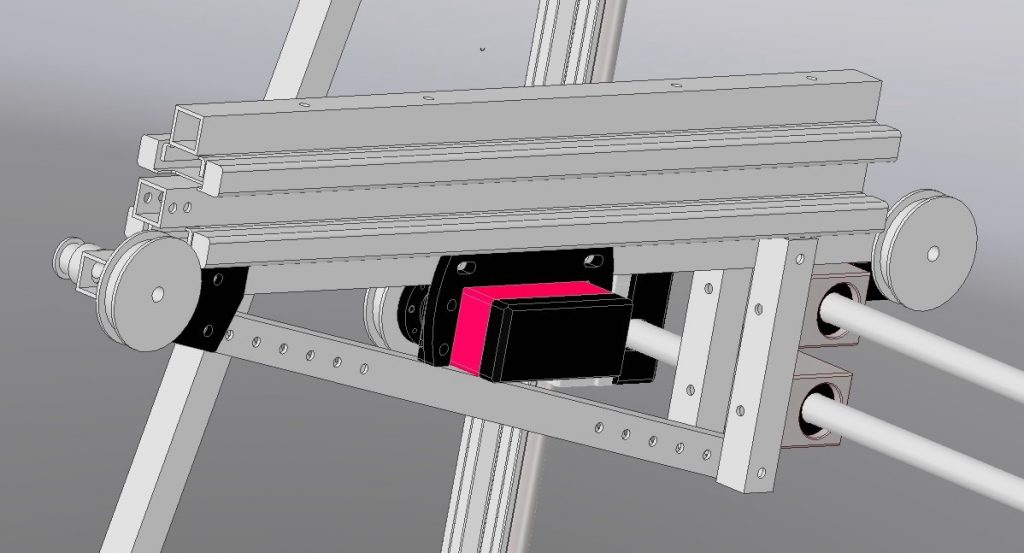
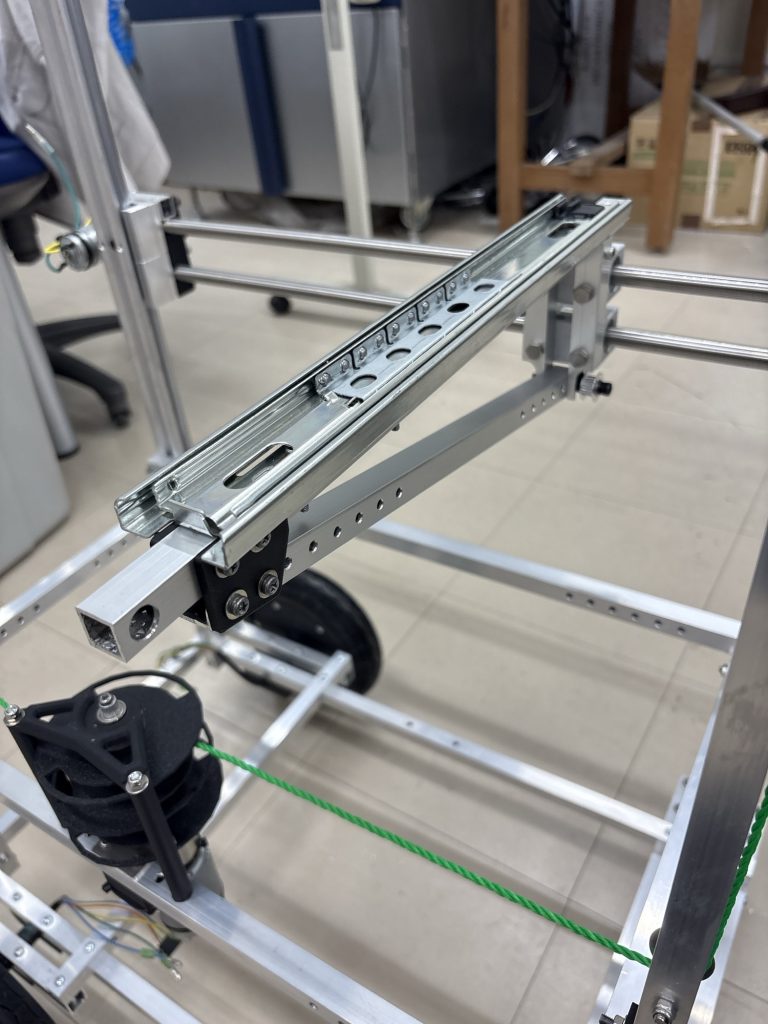
昨日までの作業でここまで完成してます。
まあかっこいいんじゃないですかね。
残りはY軸です。
作業開始!
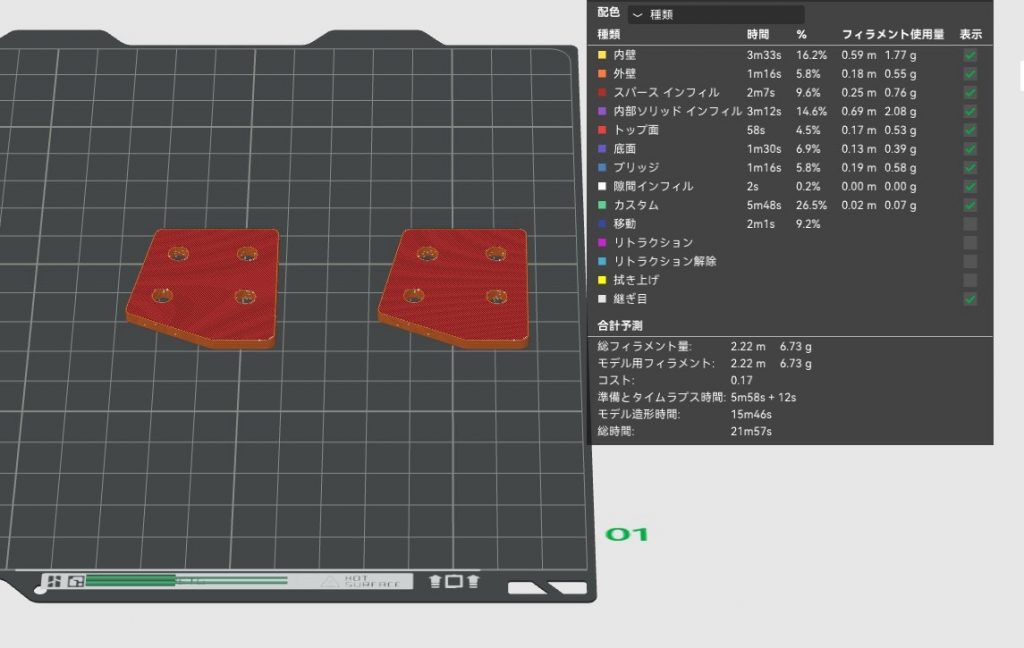
3Dプリンターでパーツを作るためにCADを進めます。
CADを描き進められそうな気がしたので作りこみます。
それっぽくなってきました。
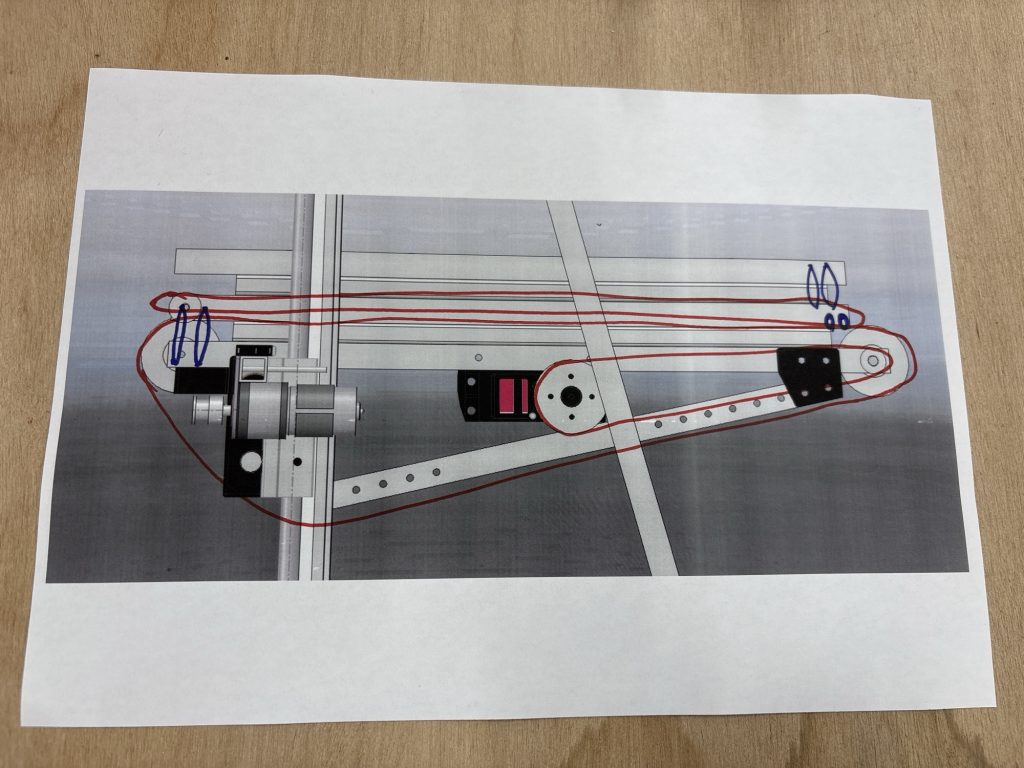
ベルトの張り方が少し複雑です。
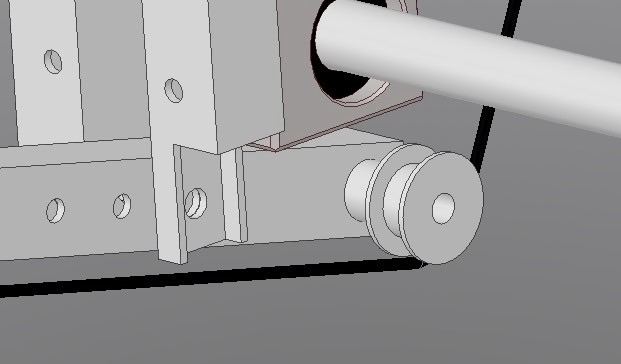
印刷して確認します。
赤線がタイミングベルトです。
青の輪が固定点。
どこか干渉してそうですが、とりあえず作ります。
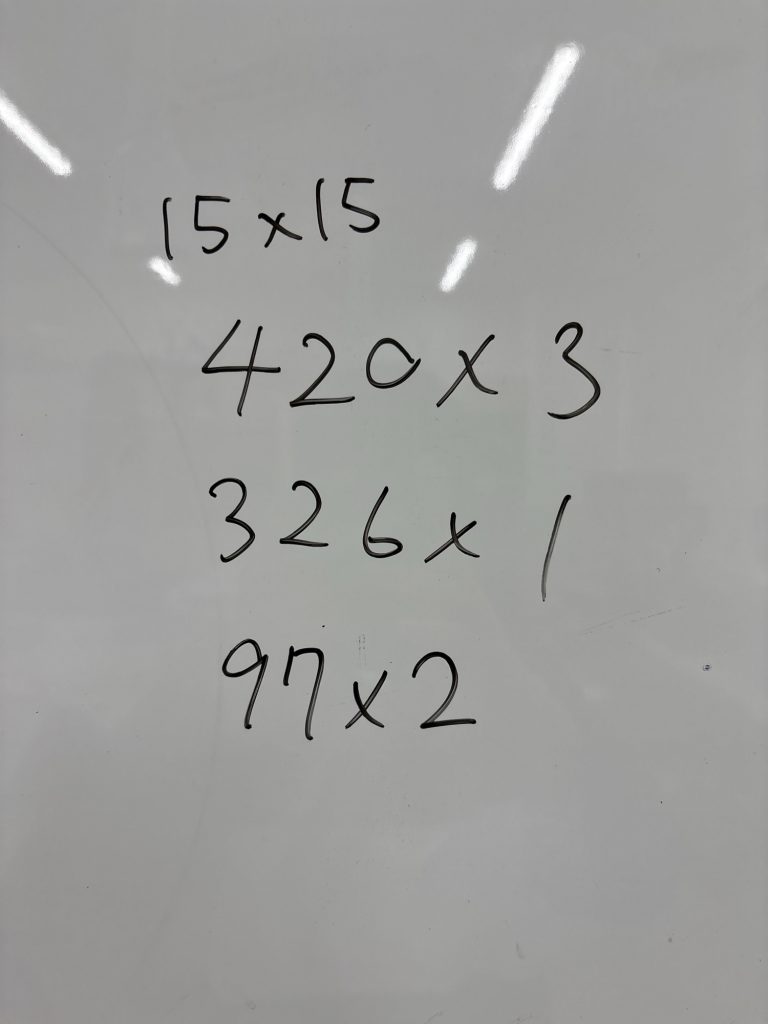
本日の部材です。

切りました。
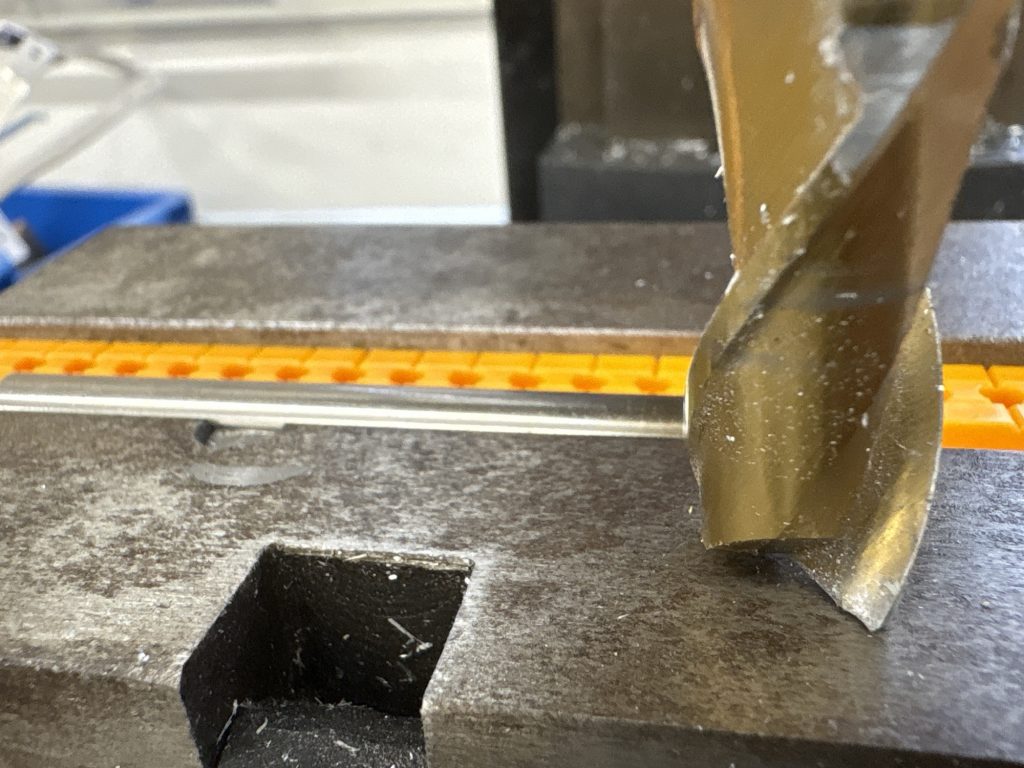
穴あけをします。
一部、特殊加工もします。


組み立てます。

もともとついていたタップがM6でした。
ネジの在庫あってよかった…
横ネジの長さが中途半端です。
横方向に大きくなるとX軸の可動域が減ってしまうのでフライス盤で削ります。
ゴニョゴニョしてレールをとりつけました。
なかなかに良い感じです。

プーリー2つの内径を6mmに拡張します。
なんでデフォルトがφ5なのかというと、もともとこの製品はステッピングモーター向けに販売されているもので、ステッピングモーターの軸径はφ5が多いから(だと勝手に思ってます)
ステッピングモーターも使ってみたいのですが、速度域とトルクが好みでないので避けています。
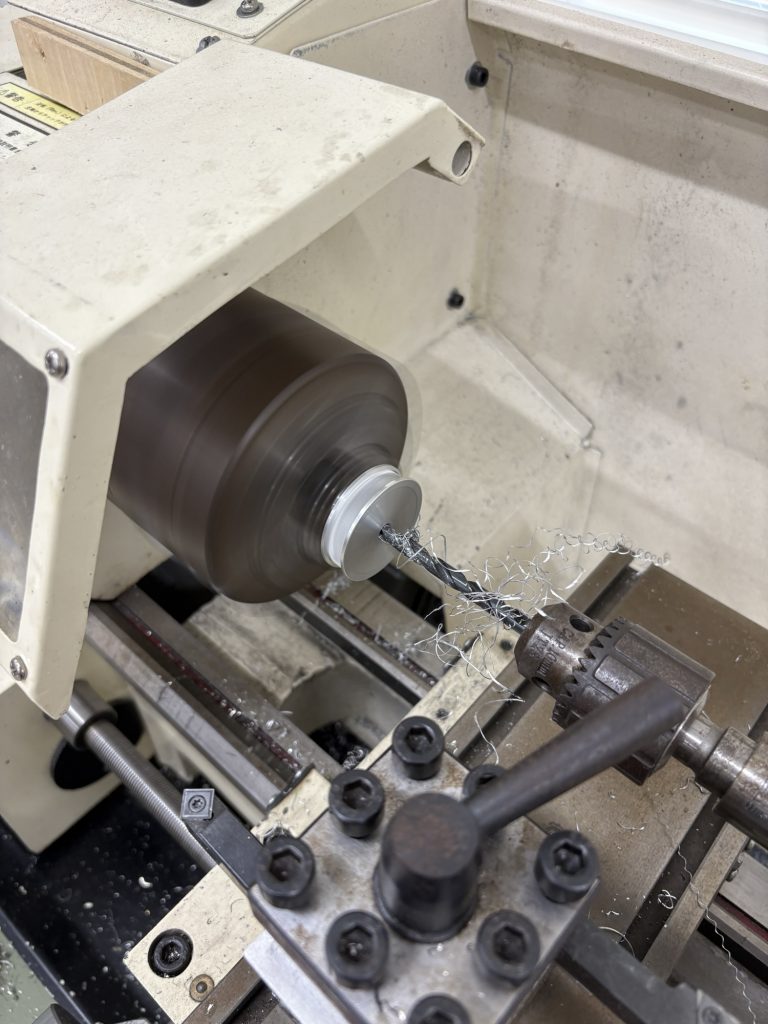

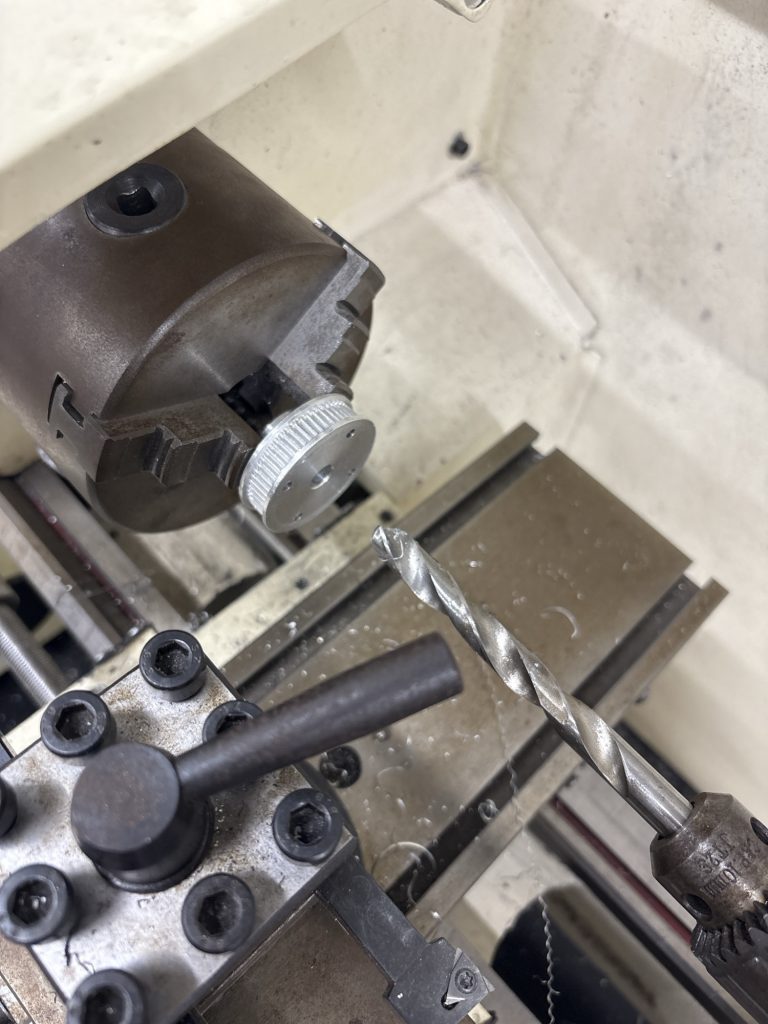
シャフトも加工します。

使うのは短い方です。
端面を整えます。
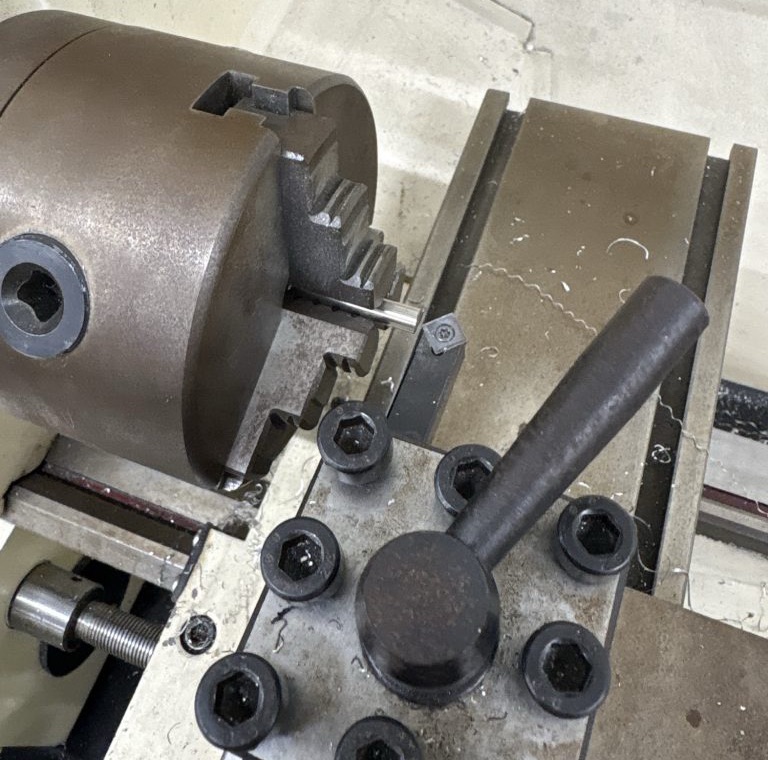
Dカットします。
材料固定とエンドミルの硬さが不安ですがやってみます。

いけました。
煙が怖かった…
これは材料が加工熱を持っていたということで、オレンジのプラスチックが溶けないか、とても不安でした。

切削油をかけまくったので周辺と自分が油まみれです。

無事、シャフトが完成しました。
組み込みます。
圧入するレベルのクリアランスでした。
スルスルです。
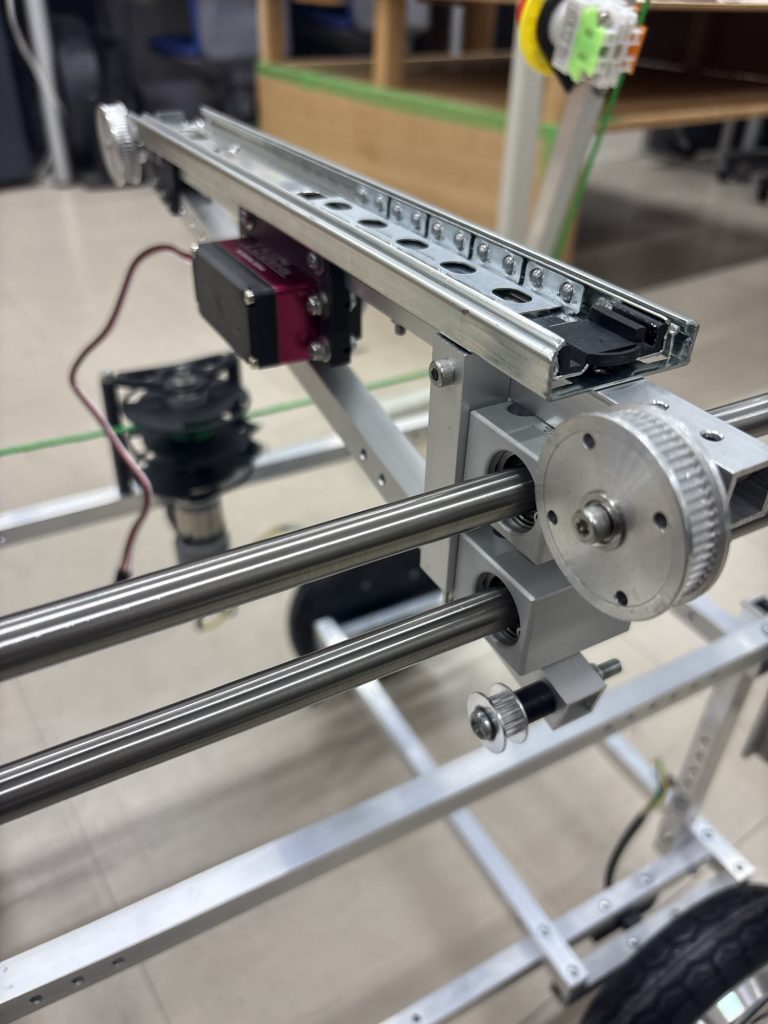
前方のプーリーはベアリングを埋め込むので軸穴をφ10にします。
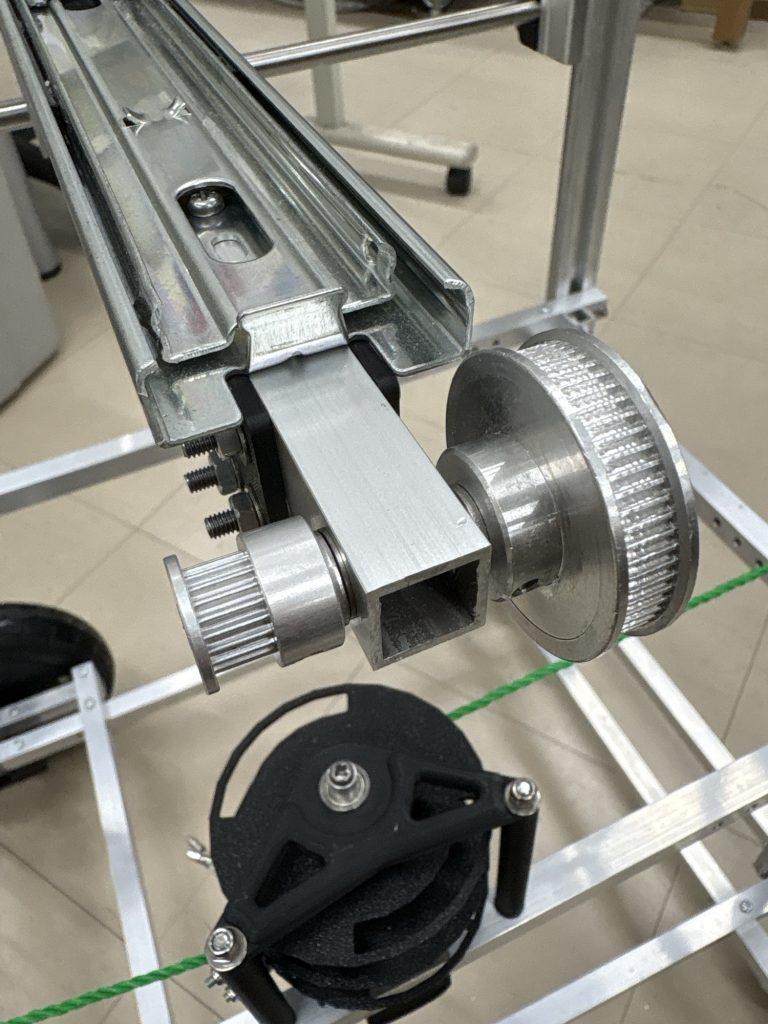
取付まで完了しました。
ベルトの経路を確認します。

2ヶ所の干渉が確認されました。
手前側はスペーサーを挟めば解決しそうです。
問題は下側。
プーリーの位置を変更する必要がありそうです。
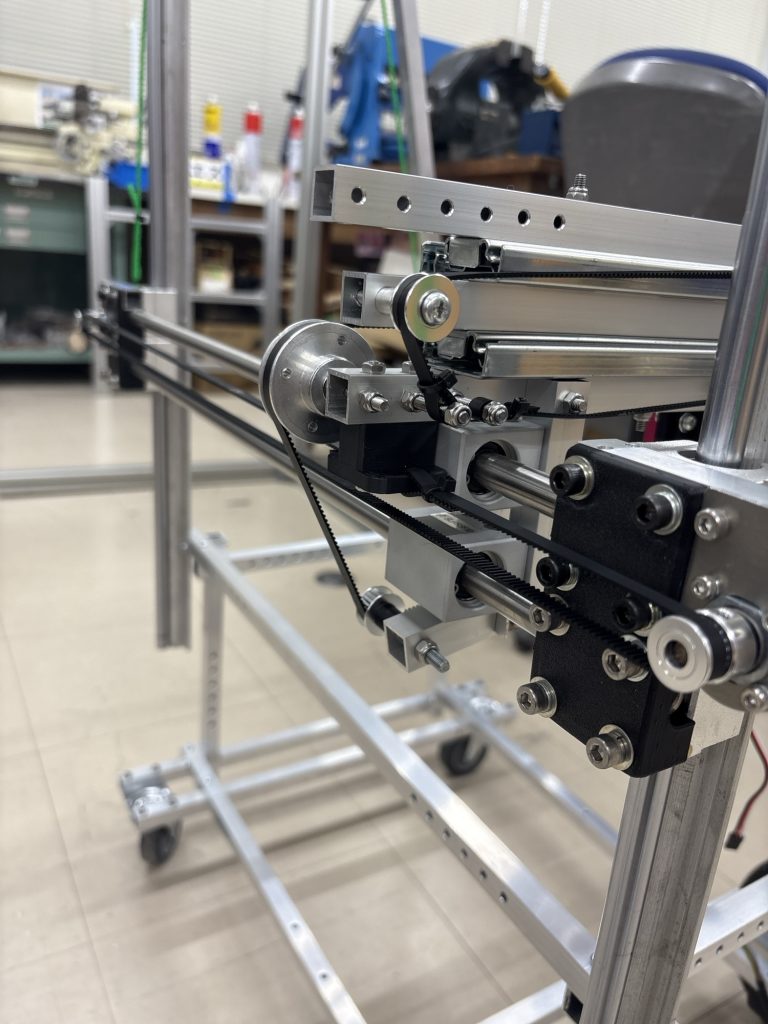
斜めに配置されてる角パイプを延長して、先端にプーリーを移動します。

都合よく延長できたら良いのですが、世の中そう甘くありません。
部材ごと作り直しです。

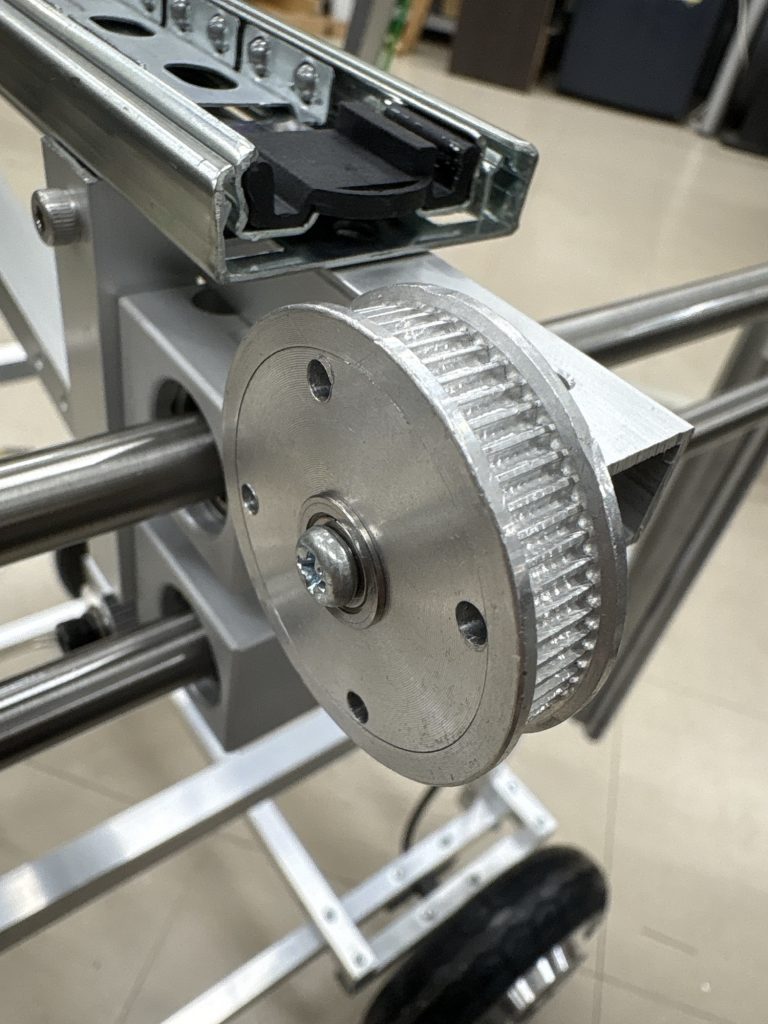
40mm延長しました。
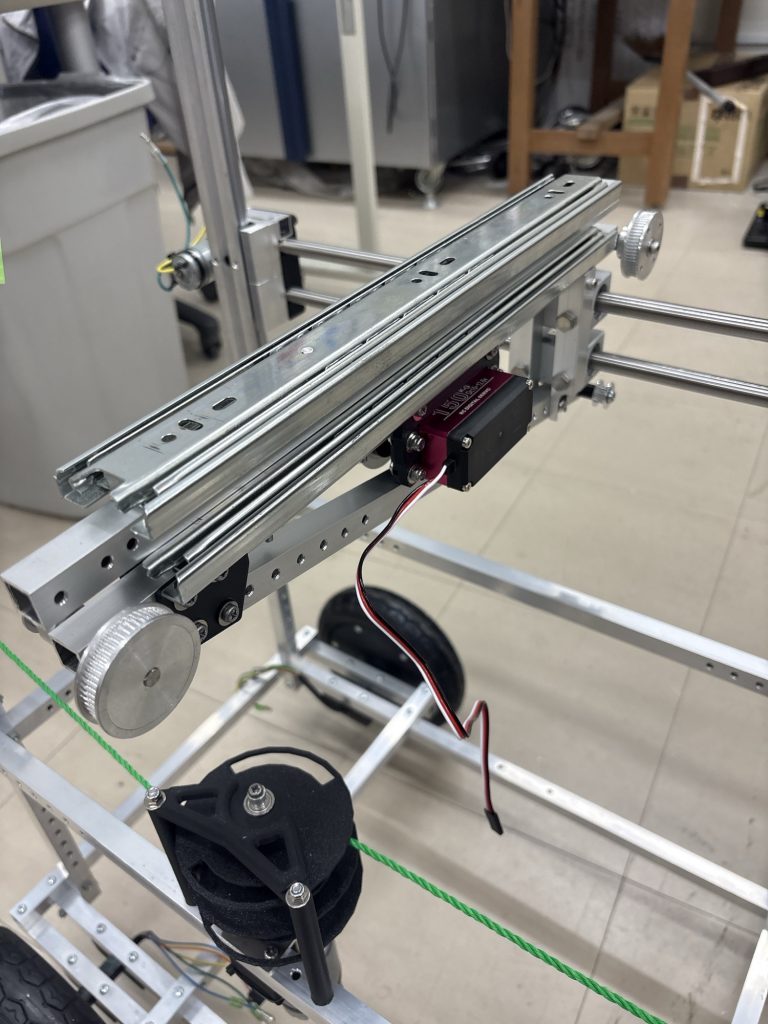
モーターとともに組み込みました。
小さいプーリーが先程より手前に突き出ています。
サーボモーターは270°回転します。
この動作を増幅してアームを700mm動かす算段です。
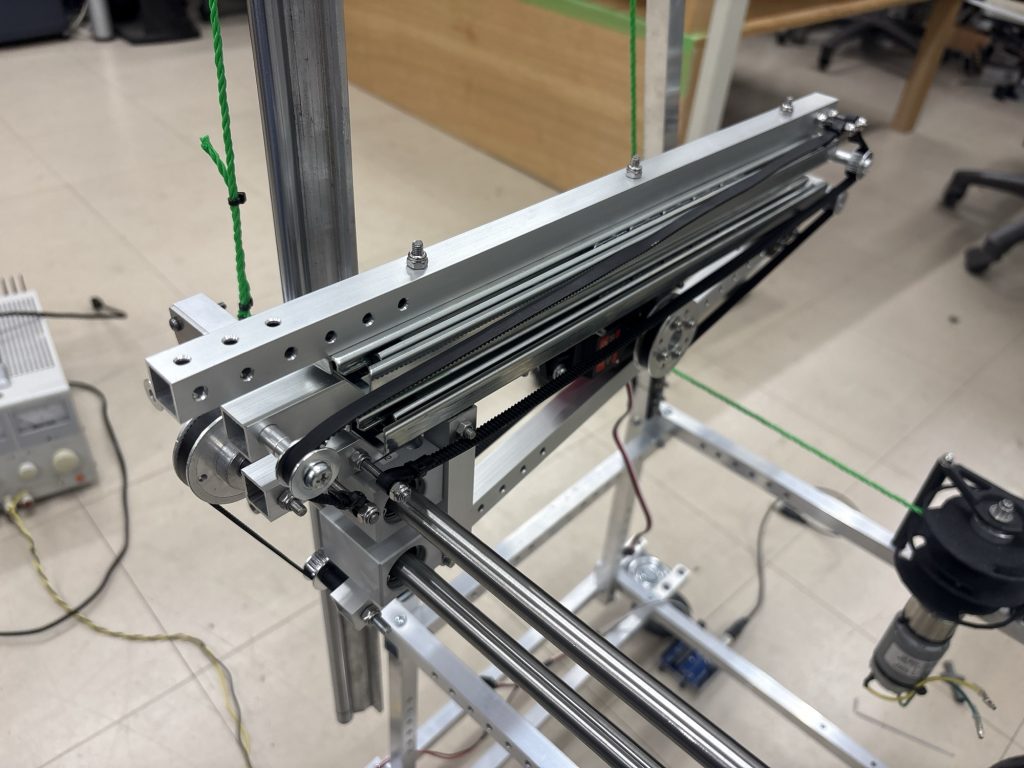
レールを合体しました。

かなり伸びます。
実際はここまで伸ばして使わないので問題ないと思いたいのですが、かなり”しなります”。
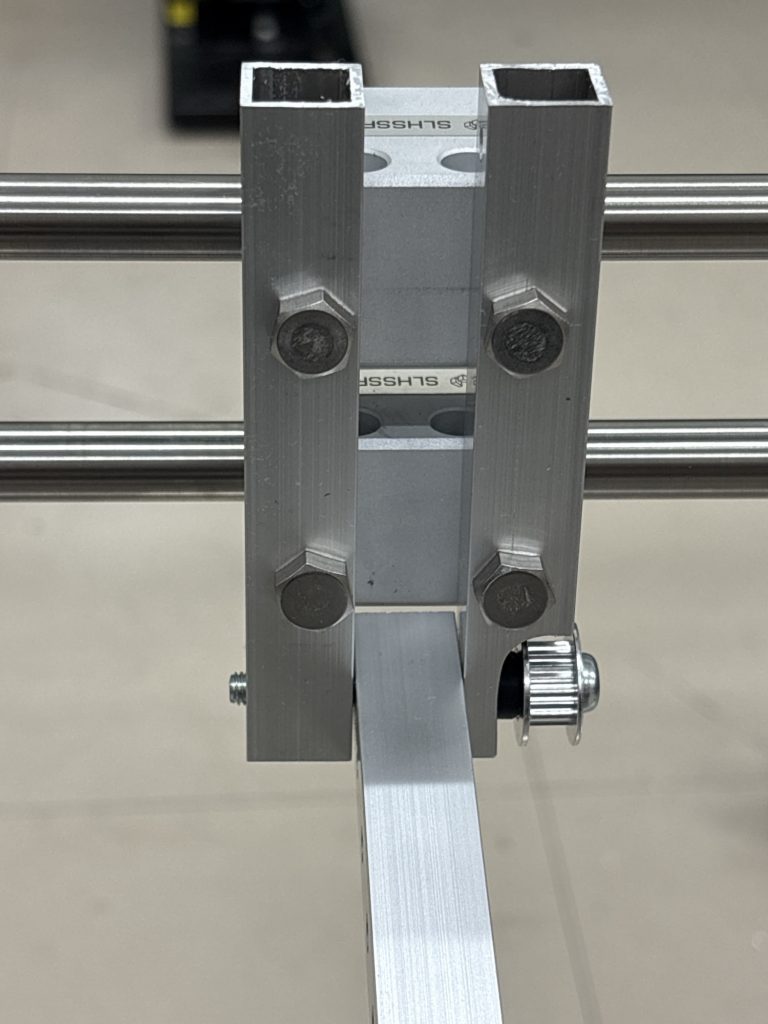
とりあえずベルトを張ってみます。

片方つけました。

もちろん結束バンドで繋いでます。
邪道です。
それでは、サーボモーターの角度を調節してから動作確認をします。
動きました!
やはり1段だと可動域の不足を感じるので2段目も予定通り作っていきます。
とにかく、1段目の動作を見れてよかった。
穴をあけ忘れたのでバラします。

この決断に時間がかかり、実は翌日になってます。
ひたすらに作業すること5時間。
完成しました。
問題は少しでも力をかけるとタイミングベルトが滑ってしまう点。
いつか何とかします。
最後にX軸のタイミングベルトを張ります。
できました。
動かしてみます。
良さそうです。
これにて、完成。
すごく体力を消耗しました。
多段展開は難しかった…
とはいえ5日間程度で形になったので良かったです。
全体の進捗としては30%くらいになったんじゃないでしょうか。
え?ハンドは作らないのか?
ナニソレオイシイノ?
…記事外で作っときます。
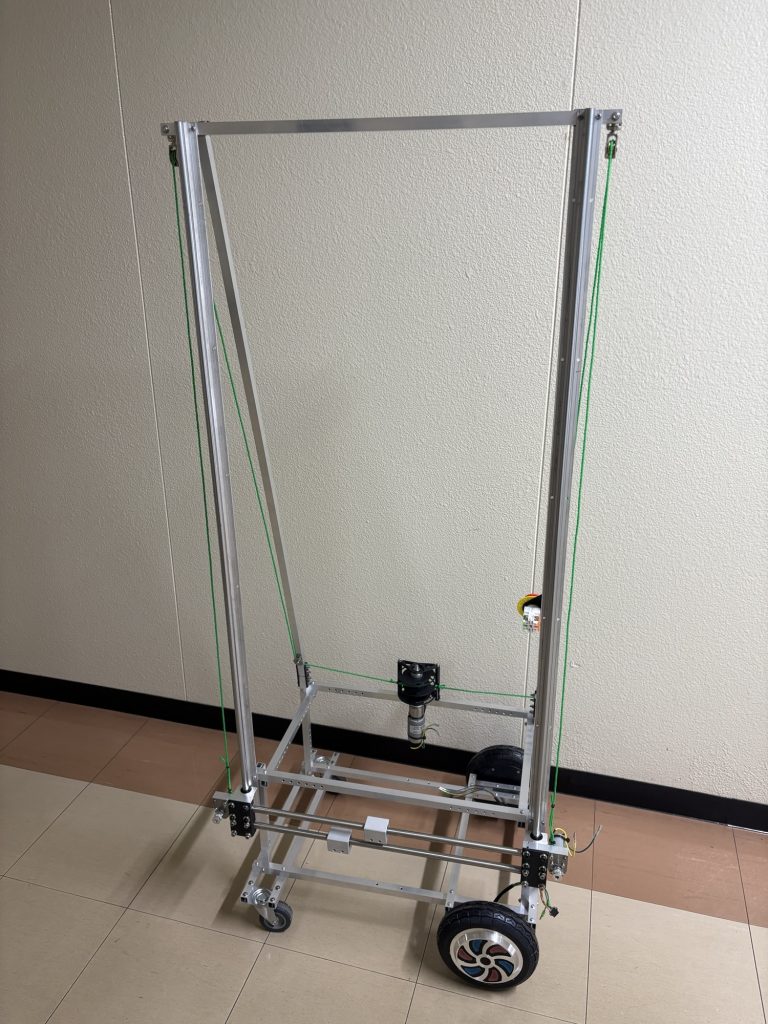
それでは最後に全体像を。
またいつか。