

なんか長引いてます。
そろそろ動いてるロボットが見たい。
ということで作業4日目。
本日こそ、XY軸の完成を目指します。
それでは、作業開始!
まず、X軸からです。
丸棒を切断します。

ステンレスなのでグラインダーを使います。
切断面が荒れるのは仕方ないので許容します。

切断しました。
使うのは長い方です。
そこそこ部品が集まってきました。
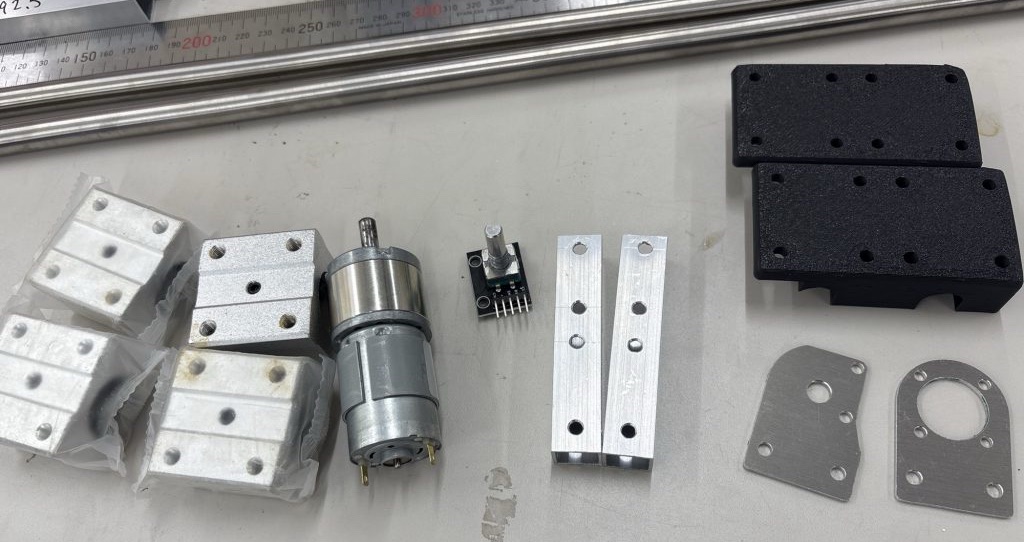
組み立てていきます。
レール下部に抜け止めをつけます。

リニアブッシュに部品を仮止めします。
丁寧にスプリングワッシャーも入れてます。
初期緩みに効果があるとか無いとか…

レールに通します。
強そうです。

丸棒を取り付けます。
イケてますね。
ネジを強く締めれば完全に固定されます。
16本のネジを均等に、かつ丸棒の傾きや幅に気を配り…
かなり苦戦しました。
モーターとエンコーダをつけます。
タイミングベルト用のプーリーも加工します。


内径をφ5からφ6に拡張します。

イモネジを普通のネジに換装します。
大会に小さい六角レンチを持って行きたくないので。

とりつけました。
干渉してます。
やはりイモネジが適任のようです。

これにて、X軸の取り付けを完了とします。

Z軸にも手を加えます。
ワイヤー駆動にする予定なのでプーリーをつけておきます。


想像以上に良さそうなのでワイヤーを張るところまでします。
モーターにつけるプーリーを設計します。
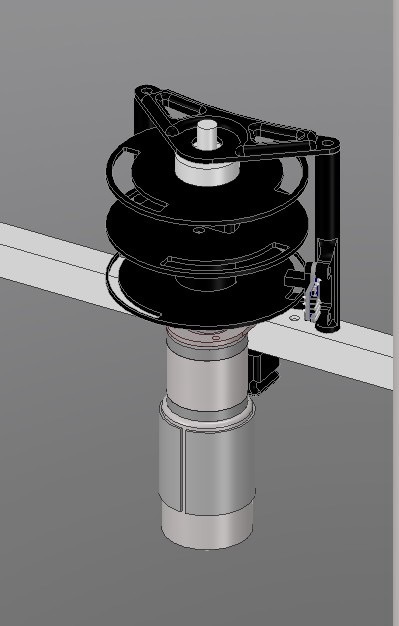
ただワイヤーを巻くだけなのに豪華な造りになりました。
もっとシンプルにしたかったんですけどね。

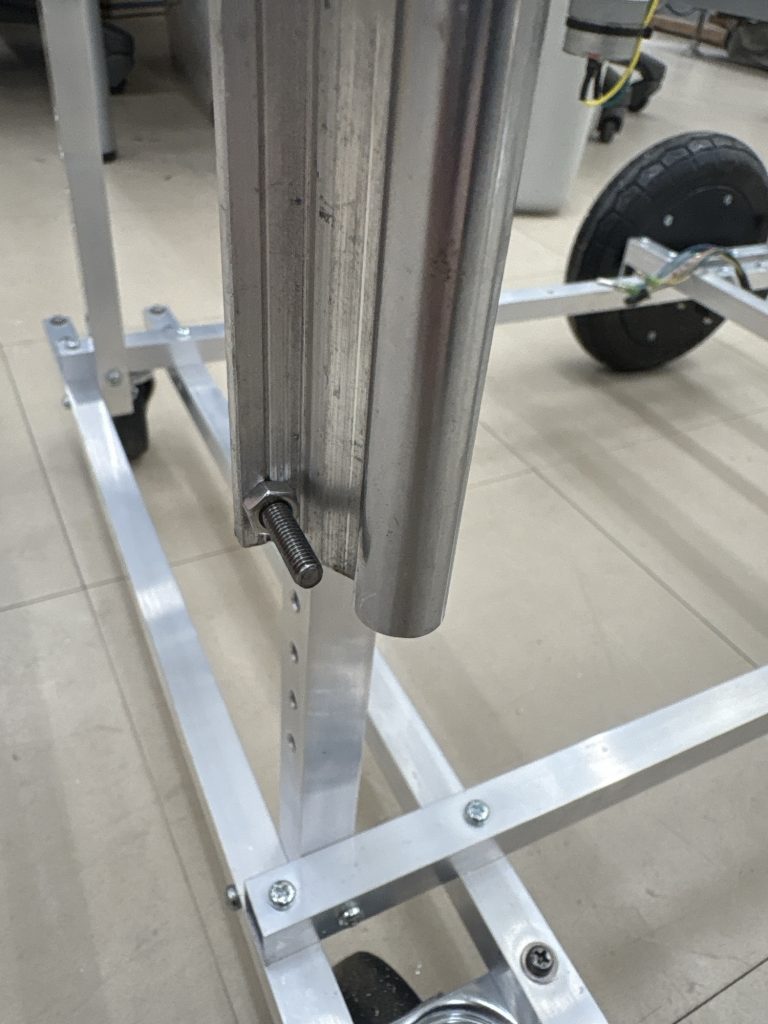
中央にはM4-70mmのネジが4本入っています。
上部もベアリングで支えてやることによって強度的にはなんとかなる想定です。

完成してました。
組み立て楽しすぎて写真撮るの忘れてました。
散々ワイヤーと言ってきましたが、使ってるのはナイロン系の紐です。
入手性が良く緑色なのがグッドです。
電源を繋いで動作確認をしてみます。
上昇良好
下降良好
Z軸完璧です。
次はY軸です。
既製品のレールを組み合わせて使います
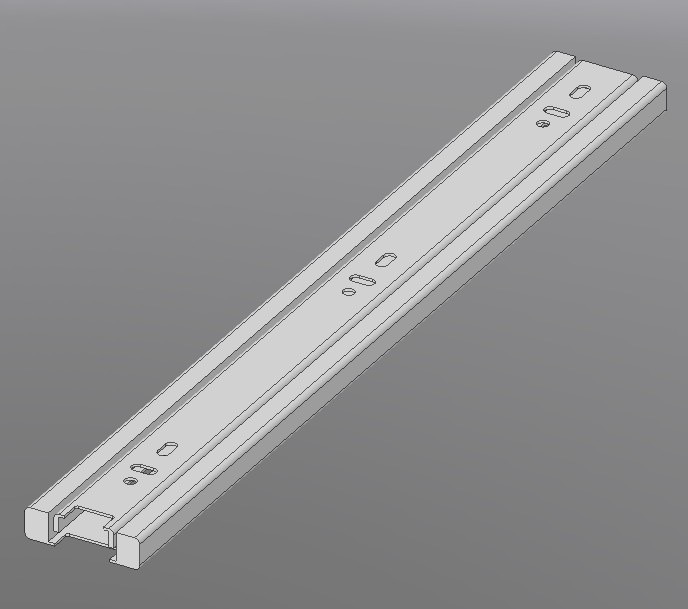
2つ組み合わせる時に干渉することが多いので確認します。

取り付けられました。
この構成をもとに設計します。
明日にはY軸も搭載できるかと思います。
テンポが悪くなっているので記事にするか迷いますが、後に引けない状況になっているのでこのまま続けようと思います。
それでは、またいつか。