

今回は九州工業大学で開催されるトマトロボット競技会で使うロボットを作っていきます。

国立大学法人 九州工業大学 未来社会ロボット実装センター
国立大学法人 九州工業大学 社会ロボット具現化センター
www.lsse.kyutech.ac.jp
大会1ヶ月前。
何も無いです。
無です。
ピンチ。
少し補足をすると、作りかけの3Dモデルがあります。
部品も一部揃えてます。


進捗的に言うと5%にも満たないです。
今から本気で作ります。
とりあえずタイヤがあれば気分が上がります。
というわけで足回りを作っていきます。
作業開始。
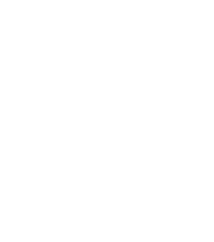
必要なアルミ角パイプの長さを書き出します。
切ります。

切りました。

穴を開けていきます。
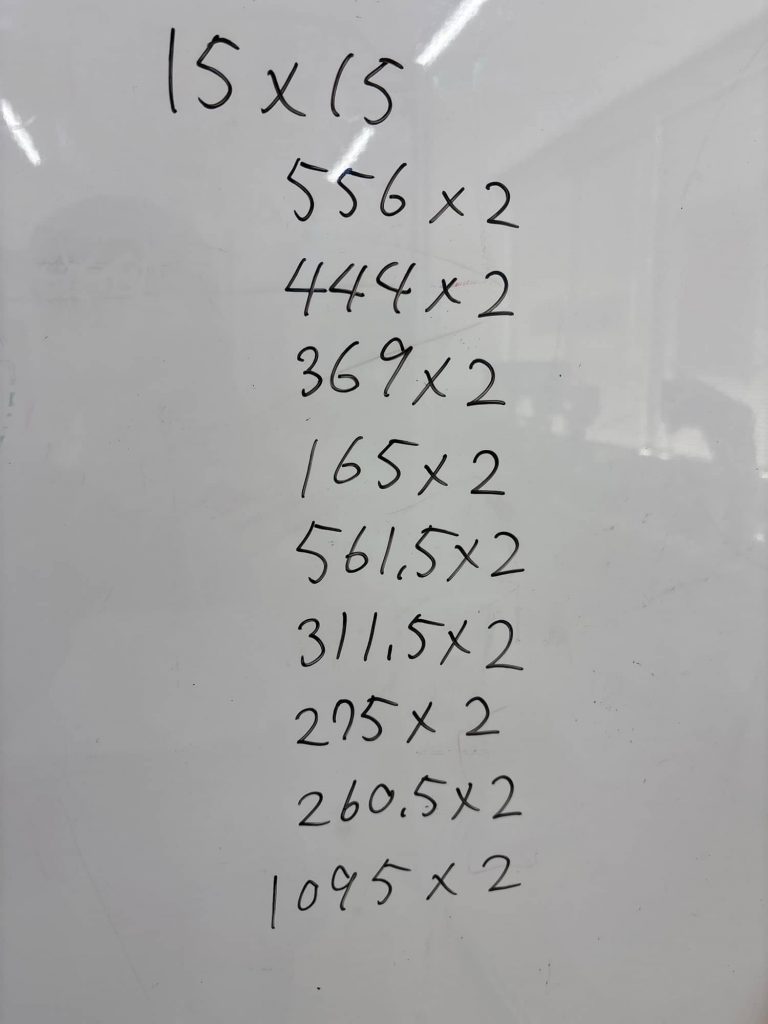
設計を忘れてた部分があるので数本は保留状態です。
進められるところから加工します。
穴を開ける箇所に窪みをつけて、
ドリルで穴あけ、バリ取りをします。


車体の形が何となくわかるくらいの部品が揃いました。

ネジとナットで組み立てます。
平面的な構造だと拘束が足りないので柱を追加します。

(平行四辺形のように歪む)
切り出しにミスがありました。
追加で切り出しと穴あけをします。
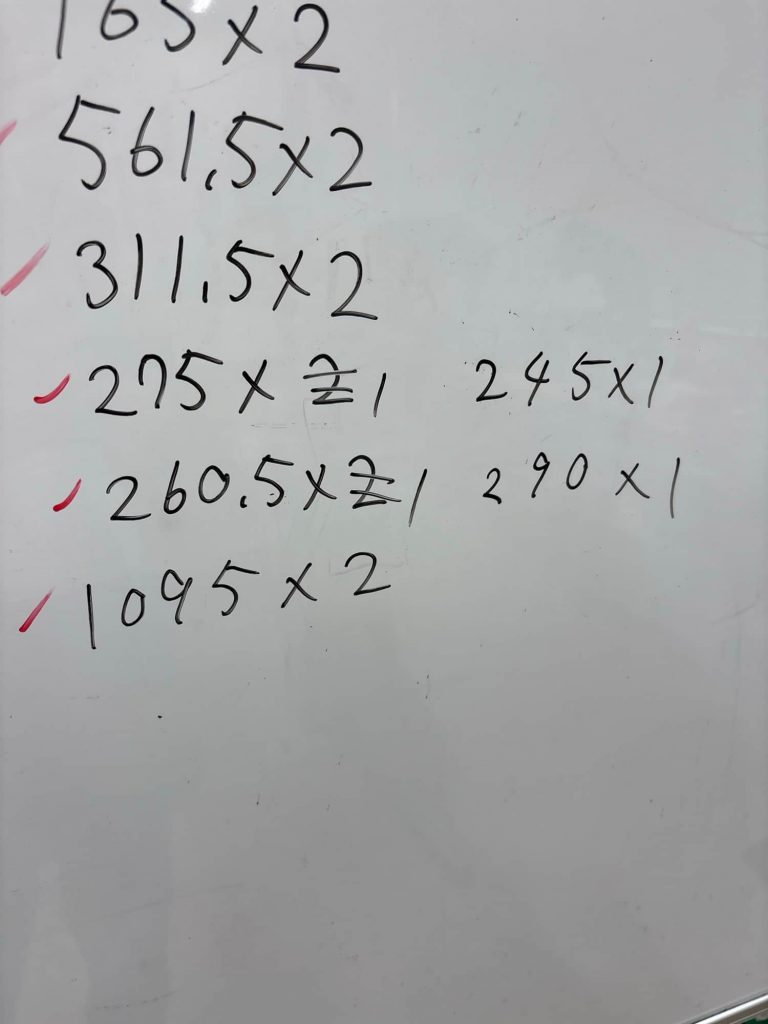

組みました。
立体になると、それっぽくなりますね
かっこいい!

この部分、大変でした。
6連の穴は基板や外装、追加の構造体を取り付け用に使います。
いちいち部材を外して加工するのは面倒なので保険的に設けてます。
それでは、タイヤを取り付けましょう。
…ネジが足りません
M4-40mmを探します。

ついでに仕分けをしていたら数時間経ってました。
ヨクナイ。
見つけました。

これでやっと組み付けられます。
それでは、完成した足回りをご覧下さい!

強そうじゃないですか?
悪くない出来栄えだと思います。
ここまでに、だいたい6時間かかってます。
CADの修正とネジの仕分けに時間を使いすぎました。
あと2日くらいで動くところまで仕上げたいものです。
それでは、またいつか。