
九産大のプロジェクトであるロボット工房は8/30に九州夏ロボコンに出場しました。
「Not Random!!」「BRAND-NEW DAY」の2チームで参加し、Not Random!!が優勝しました。
私はこのチームのリーダーを務めていたのでロボットについて簡単にご紹介します!
まず、ルールについてです。
毎年変更されます。
2025年度のルールは以下の内容でした。
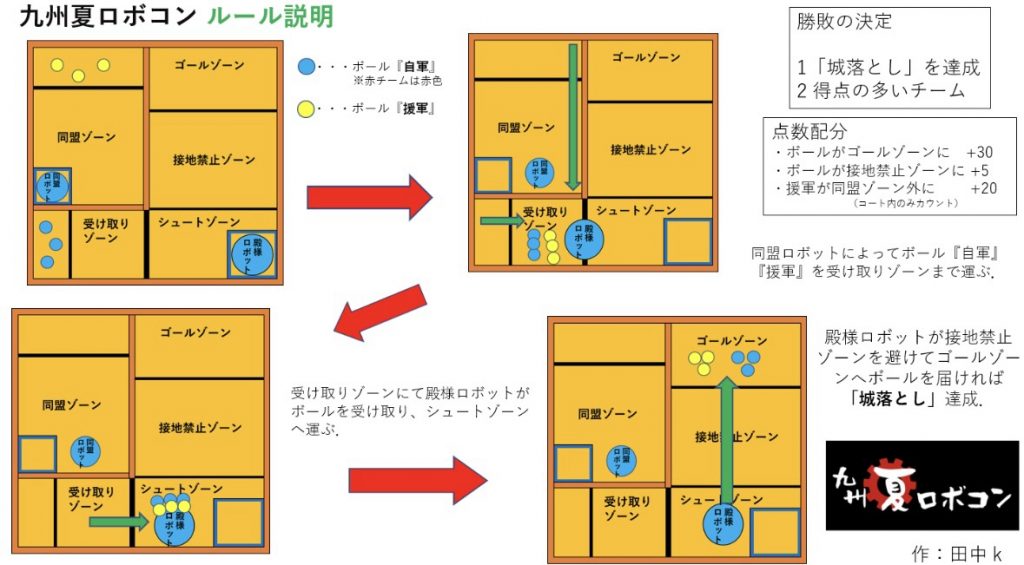
簡単にいうと「同盟ロボット」にパスしてもらったボールと置いてあるボール合計6つを「殿様ロボット」がゴールゾーンに運び入れる。
この作業を速く達成したチームが勝利するということです。
ポイントは
・ロボットからロボットにボールをパスすること
・ゴールゾーン手前に接地禁止ゾーンがあること
です。
ロボット2台の連携やボールを遠くへ運ぶ能力が問われます。
ということでお待たせしました。
我々が制作したロボットはこちらです!
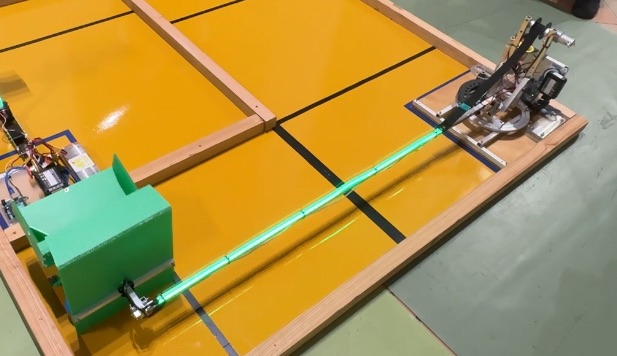
↑ 殿様ロボット
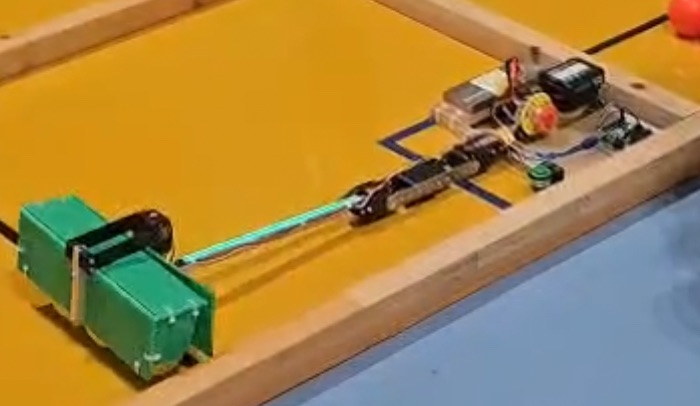
↑ 同盟ロボット
両方グリーンのネオンライトをつけてますカッコイイ!
特徴はタイヤを持たない点です。
そもそもこの大会、ロボットが自分で動いてアイテムを取りに行くという固定概念がありました。
しかし今回はロボットのサイズ制限で高さに制限がなくアーム伸ばし放題だったんです。
同盟ロボットからすればボールは目と鼻の先です。
なんなら、殿様ロボット側から見てみるとアイテムの回収地点と設置地点が同じ距離にあります。
こりゃタイヤつける方が遅い
というわけでノッポでシンプルな形になりました。
少し技術的な面もご紹介します
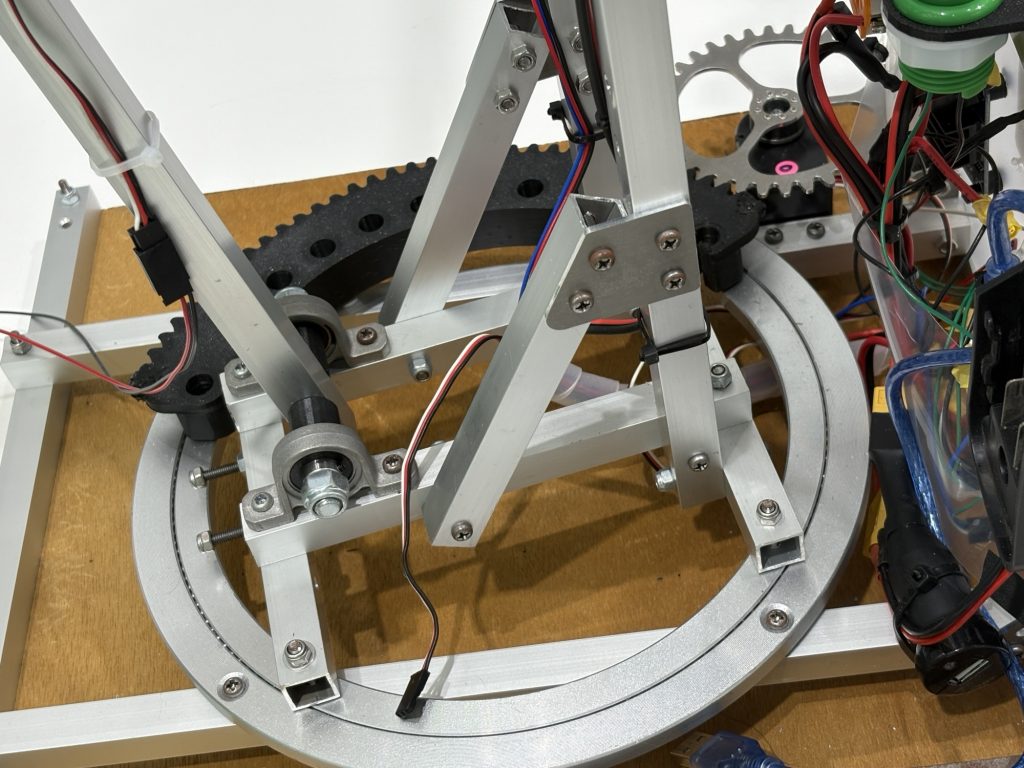
殿様ロボットは土台に固定されている大きなベアリングで上半身が回転します。
サーボモーターの可動域いっぱい(270°)動くときに90°旋回するようにしました。
実はサーボモーターの出力に対して一瞬だけトルクオーバーする可能性がある設計でした。

アームの上下はベルトの巻取りで行っています。
モーターはTAMIYAの380で36ギアくらいです。
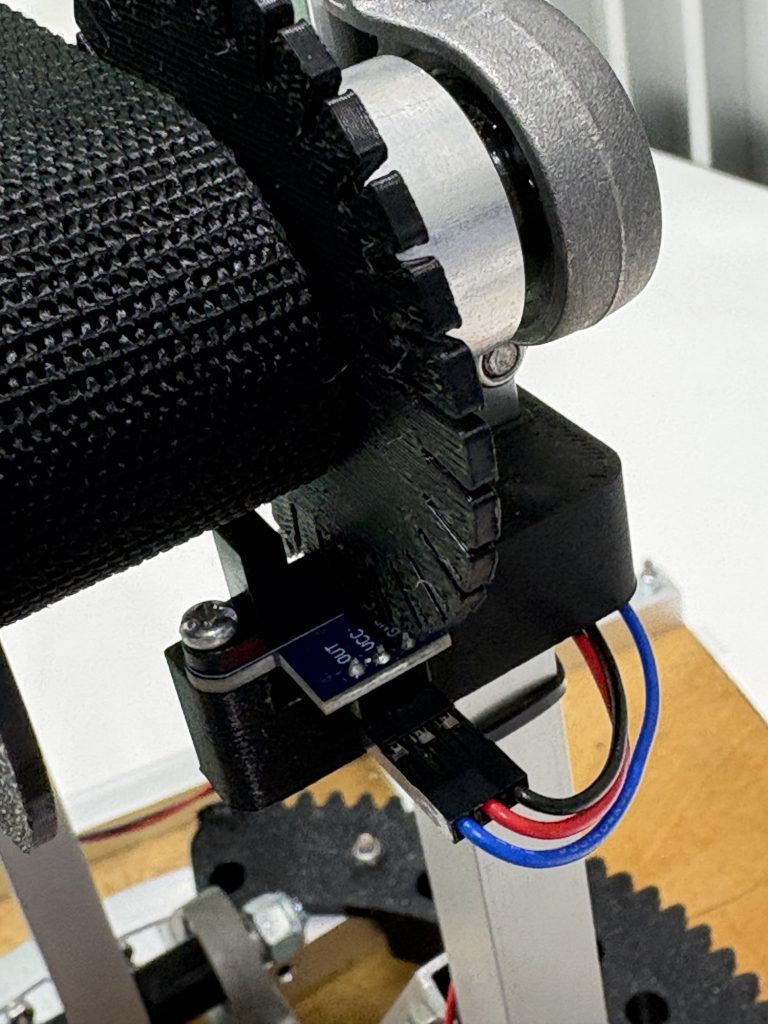
プーリーには32本の切込みをつけ、むき出しのエンコーダで回転数を測っています。
このエンコーダは物理的に割り込み頻度を調節できるのでArduinoUNOでも読み飛ばしがないレベルに調節できます。
一方で、回転方向が検出できないのでモーターが動く方向をプログラムであらかじめ設定し加減算していました。

先端は赤or青のボールを掴むハンドと黄色のボールを格納するバケットで構成されています。
マイコンからの距離が1.5mほどあるのでサーボの動作不良を心配していましたがUART通信は想像よりも頑丈でした。
グリーンのネオンライトは末端のサーボから電源供給しているため、確認灯として非常に優秀でした。
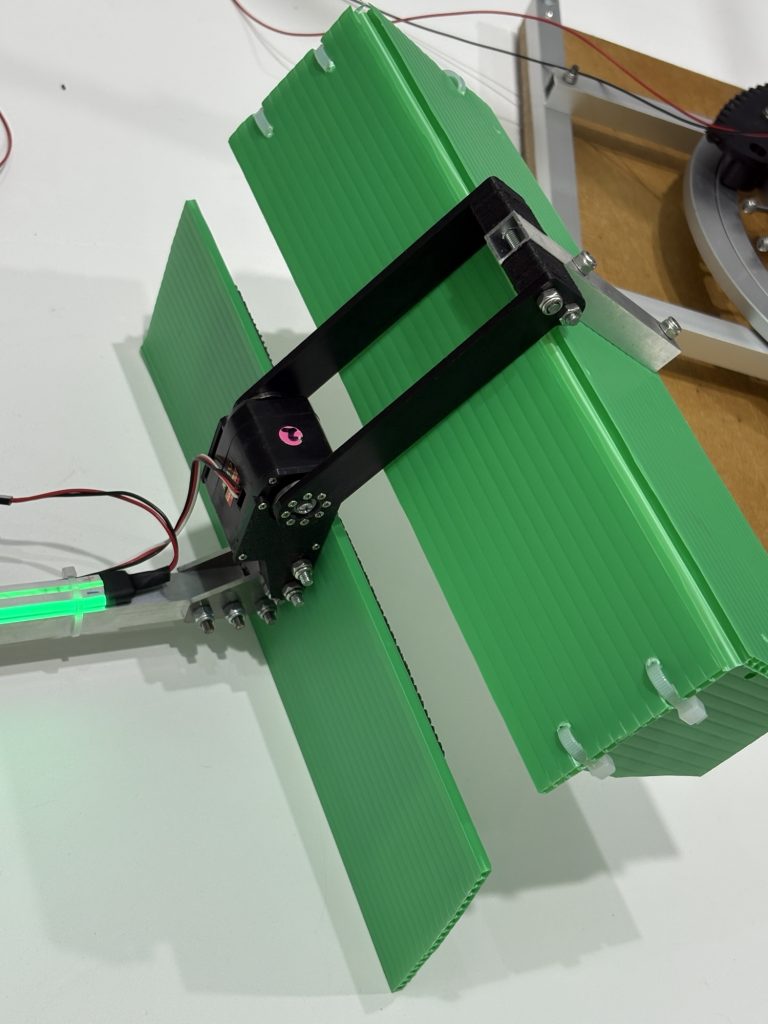
同盟ロボットはシンプルです。
先端でボールを挟んで掴みます。
後ろ側にボールをパスするので上と横からボールが溢れないように囲があります。
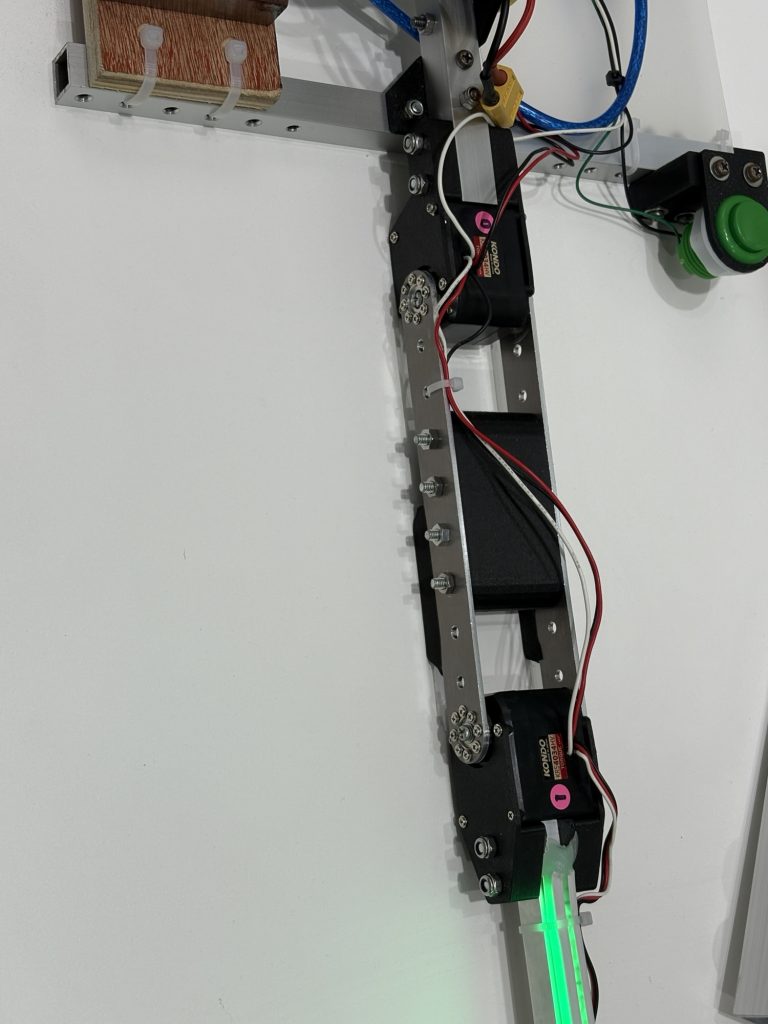
アームは2関節あります。
反動を軽減したり、最短経路に近づけたり…
自由度が高い分、制御が難しそうでした。

逆に配線は、これ以上ないほどコンパクトです。
サーボモーター用のUART通信線とスタートボタンの読み取り線のみで構成されています。
というわけで、いかがでしたか?
単純な動作に拘りを詰め込んだ機体でした
期間限定でコラボリウム前に展示しているので是非ご覧ください

ここまで読んでくださり、ありがとうございます!
またいつか。