

おはようございます。
どうやら、K*RISEの合宿が1泊2日であるようです。
私も合宿をエンジョイする予定でしたが、大会2週間前なのに完成しないロボットのことで頭がいっぱいです。
仕方ありません。合宿を楽しみつつ進捗あげます。
1日目のスケジュールは以下のとおりです。
限られた時間でロボットを作って、かつ記事を書かなければなりません。
この時点でやや無茶な予感がしますが、やるかやらないかではなく「しなければならない」のです。
それでは早速、現状をお伝えします。
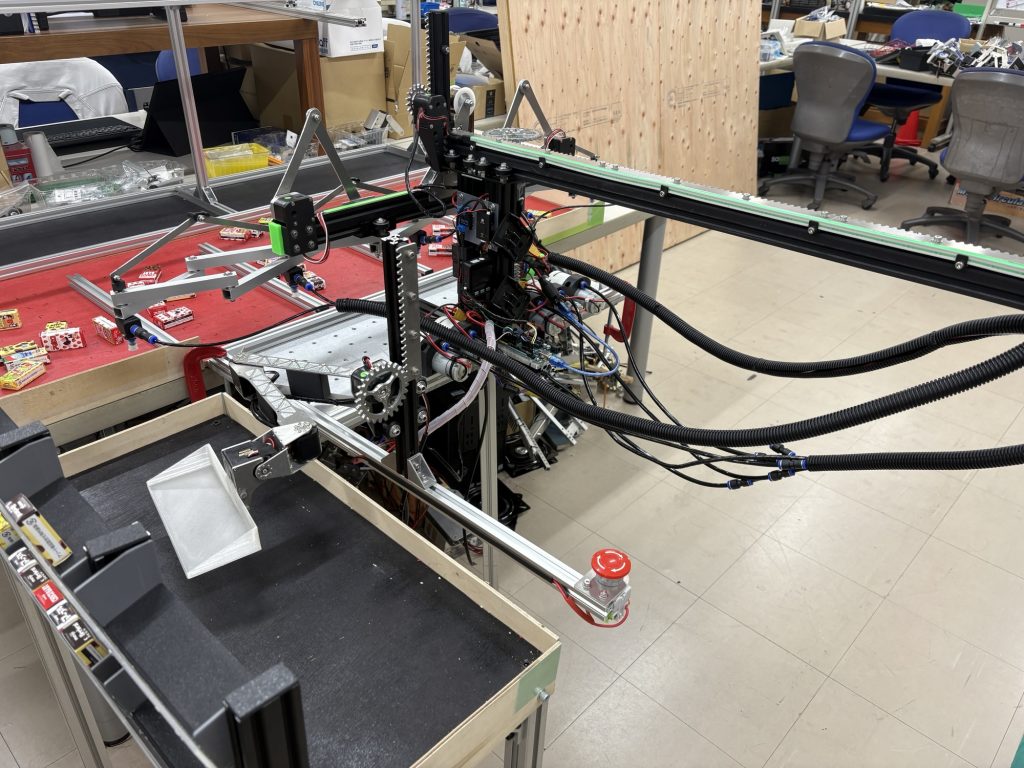
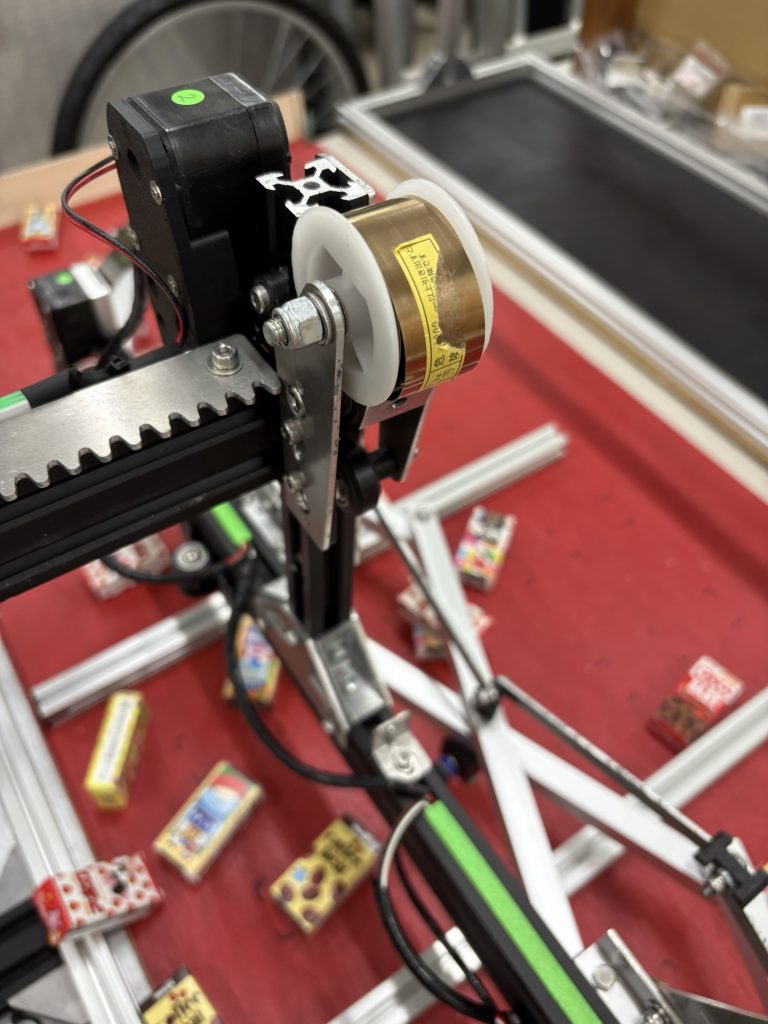
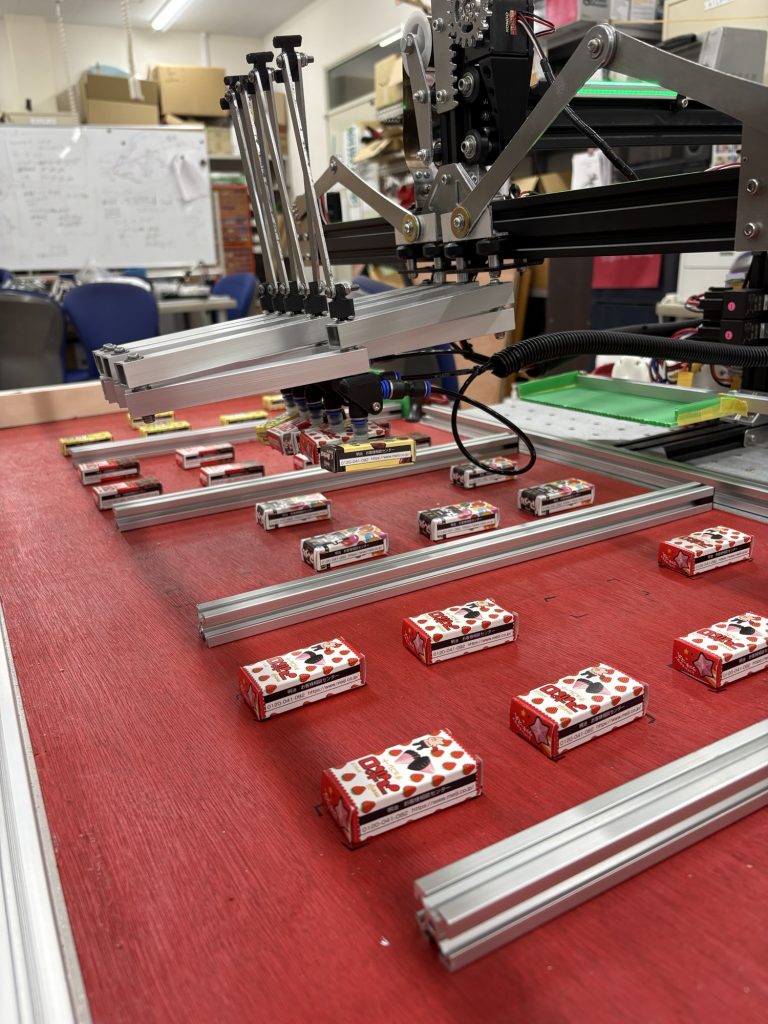
かっこよくないですか?
この見た目で現状1点もとれません。

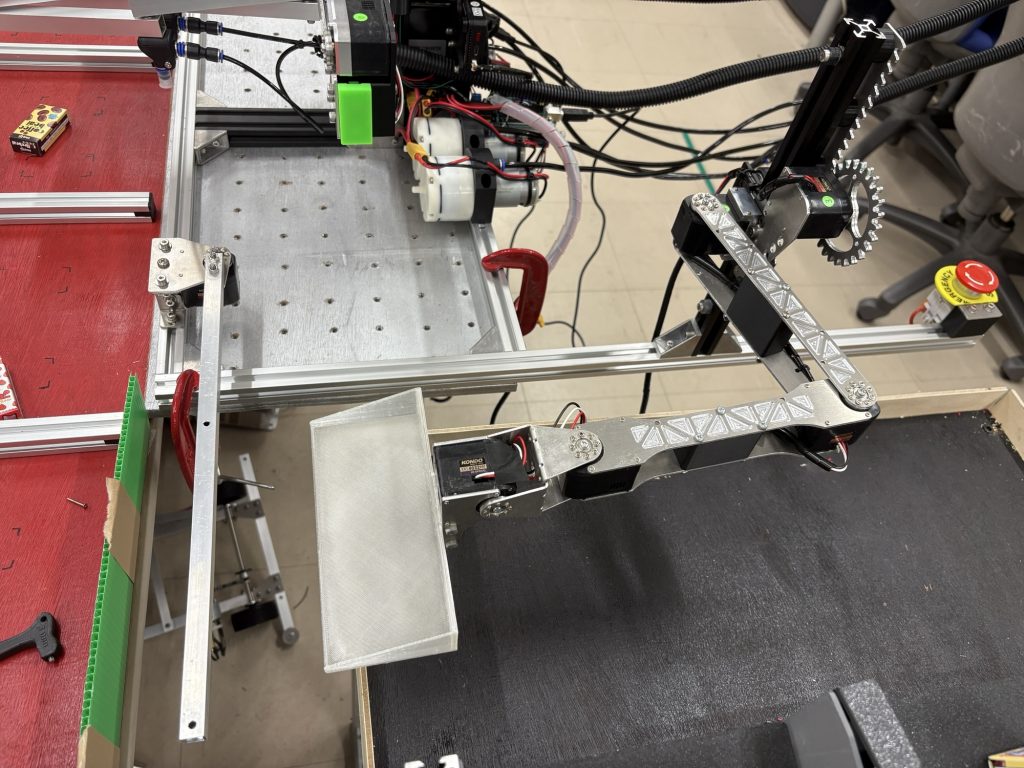
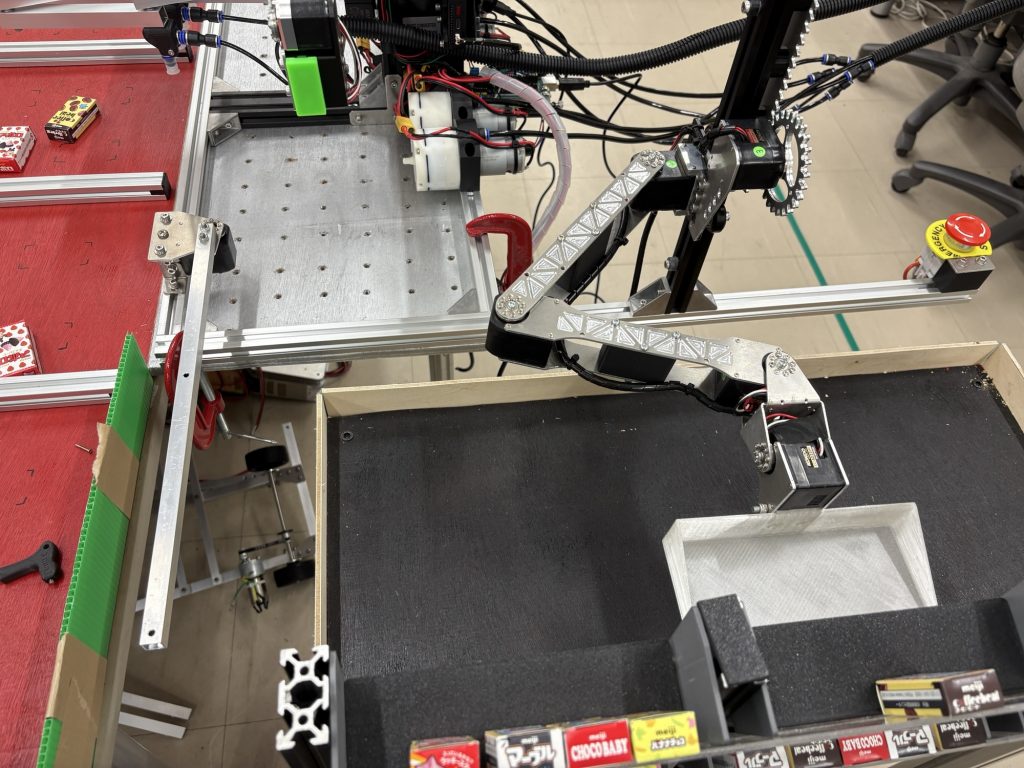
このロボットに求められる仕様は、このようにお菓子を回収して横にあるシューティングエリアに置くというタスクをこなす事です。
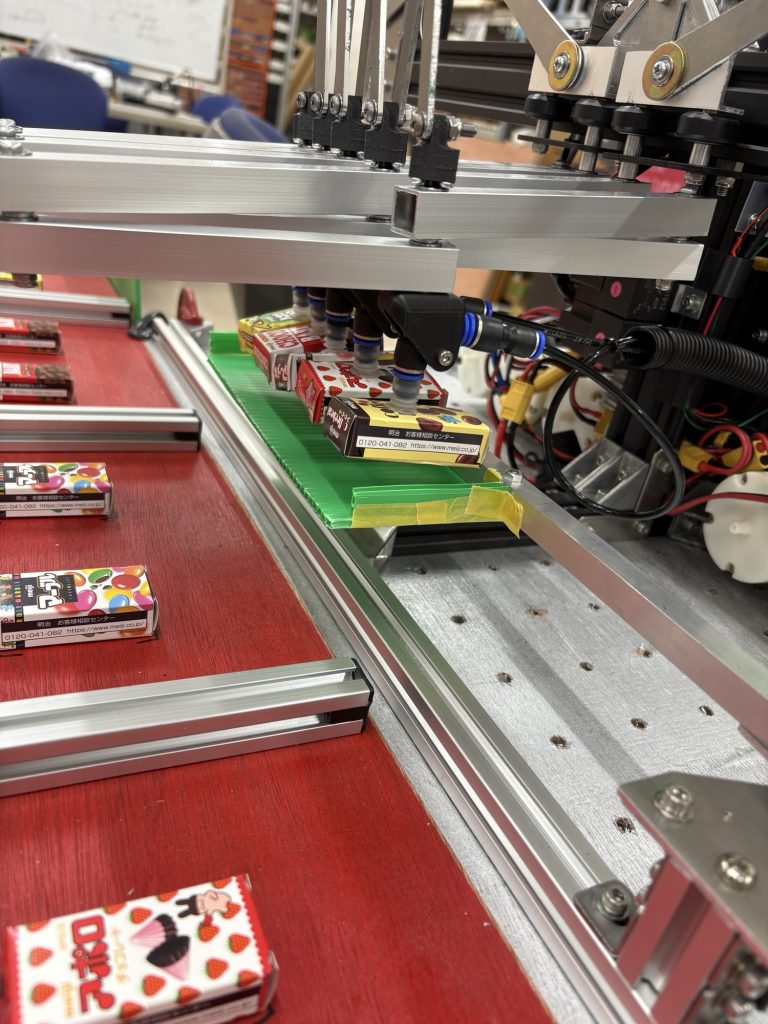
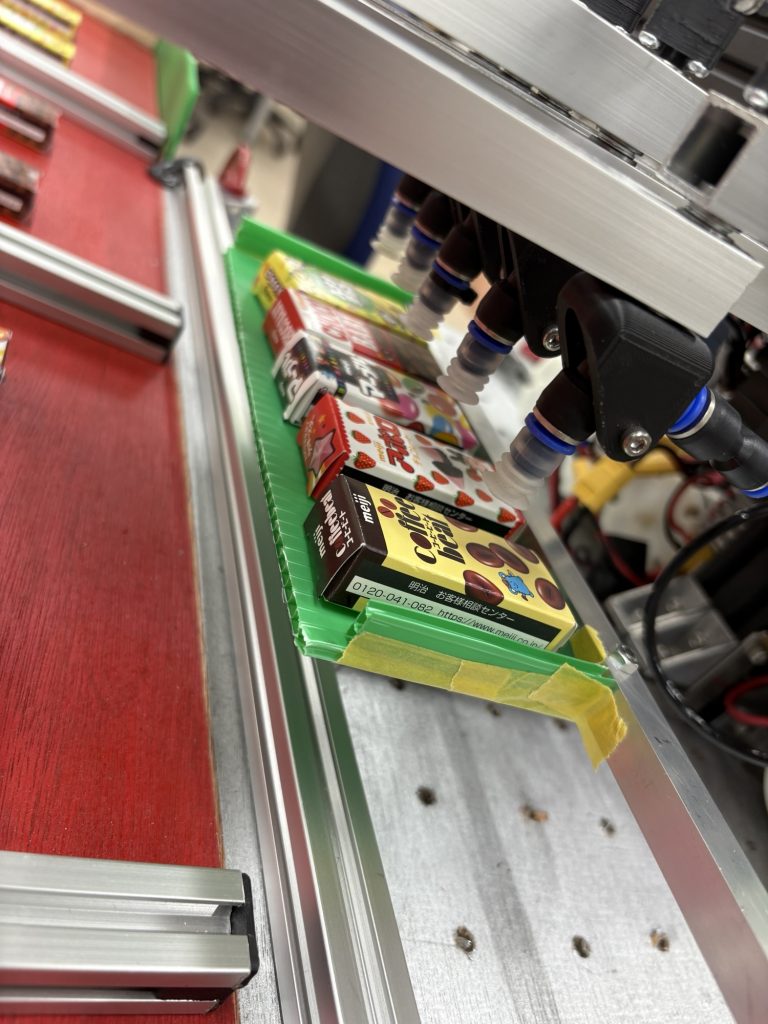
いや、不安定ながら回収はできるんです。
取ったお菓子を横のシューティングエリアまで持っていけないため、得点できません。
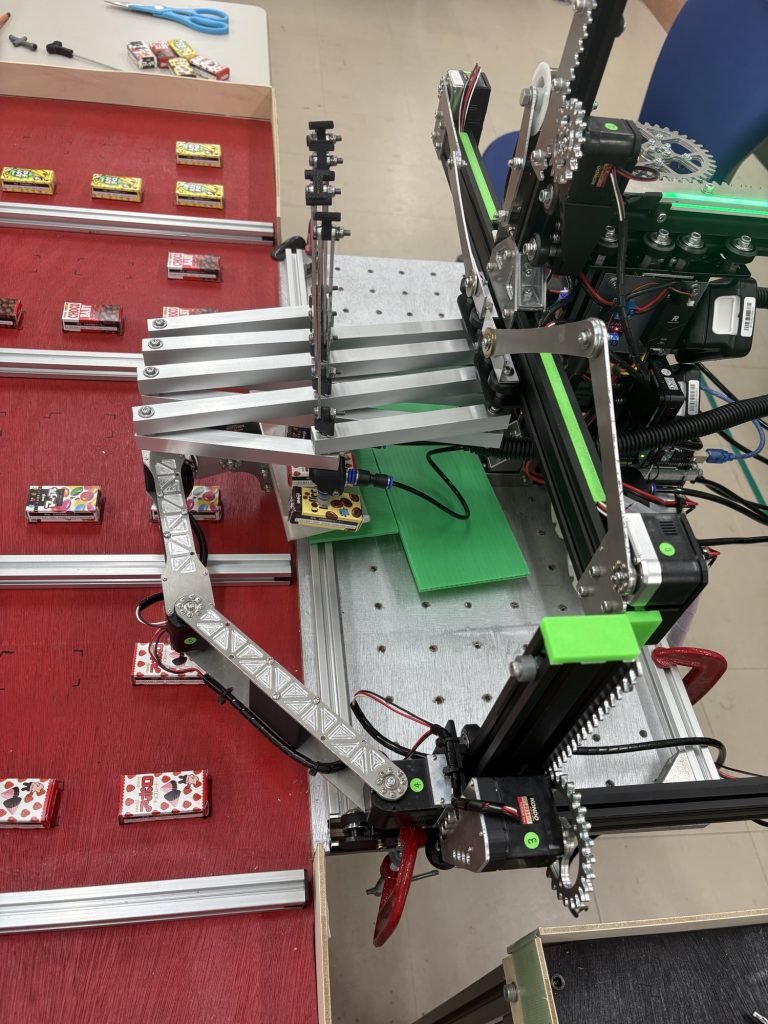
設計当初はサブアームをこのように回り込ませてお菓子を受渡し、そのまま得点する予定でした。
しかし、このサブアームがお菓子を受取る姿勢、どう考えても綺麗に受け取れません。
問題点がいくつかあります。
- 受取り皿の大きさが足りない
- アプローチ姿勢が苦しい
- Z軸の可動域不足
- Y軸の自由度が被っており精度がでない
設計段階で気づけなかったことを悔やんでもしょうがないので解決策を考えます。
ええ。考えます。
まだ、これといった解決策が思いつきません。
めちゃ焦ってます。
とりあえず、Y軸の重複を無くすため直道機構を1つ消します。
消しました。(Z軸も延長しました)
※ここまでが昨日までの進捗です。
ロボットはシンプルであればあるほど良いとされています。
スカラアームを制御できるか怪しいですがやるしかないですね。
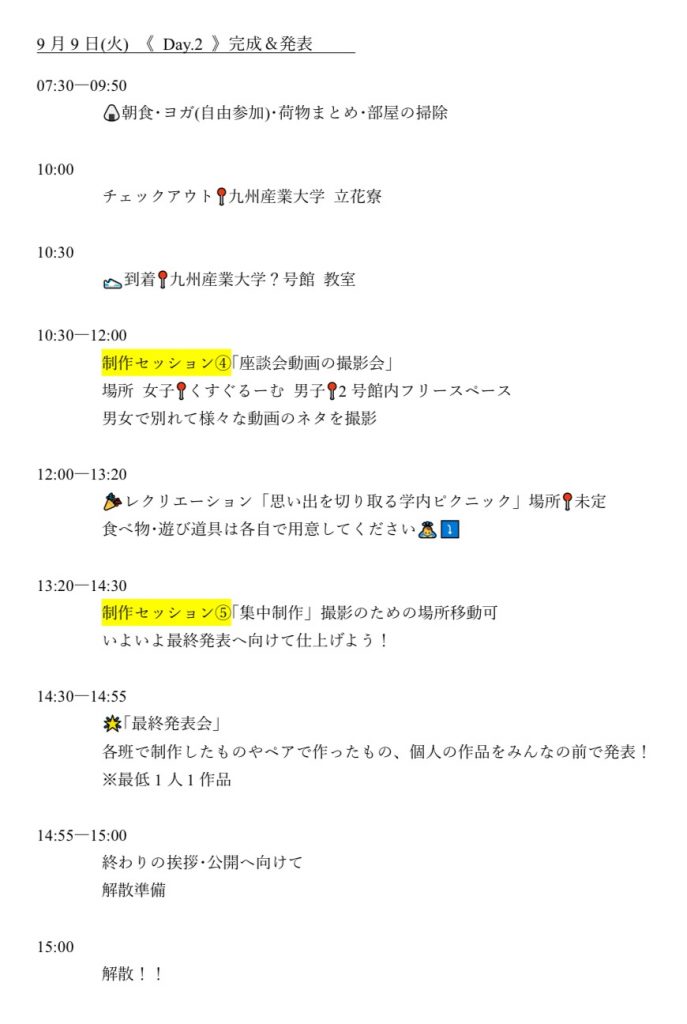
8:30~9:50
というわけで1日目の朝です。
集合前の時間は自由です。
作業します。
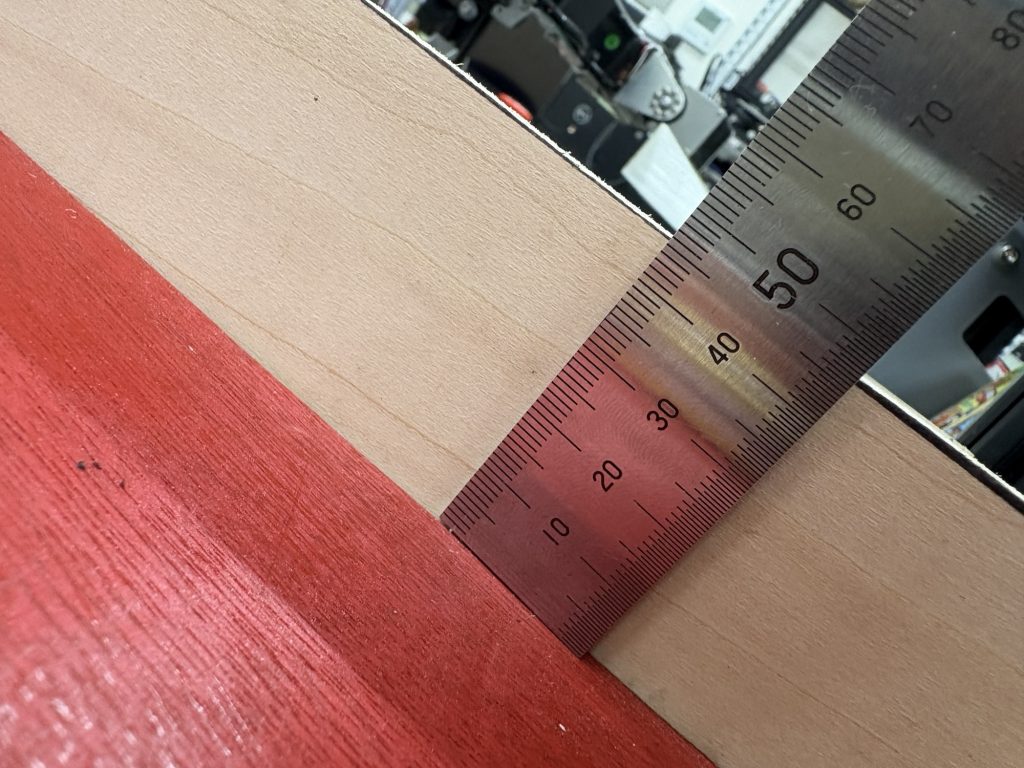
ここで問題発生。
コートの縁が本来50mmのところ45mmしかありません
なんで…
応急処置します。

切ります

貼ります
完成しました(影響するのは手前だけなので。)
次。

土台を20mm下げたので緊急停止ボタンが下側に飛び出しています。
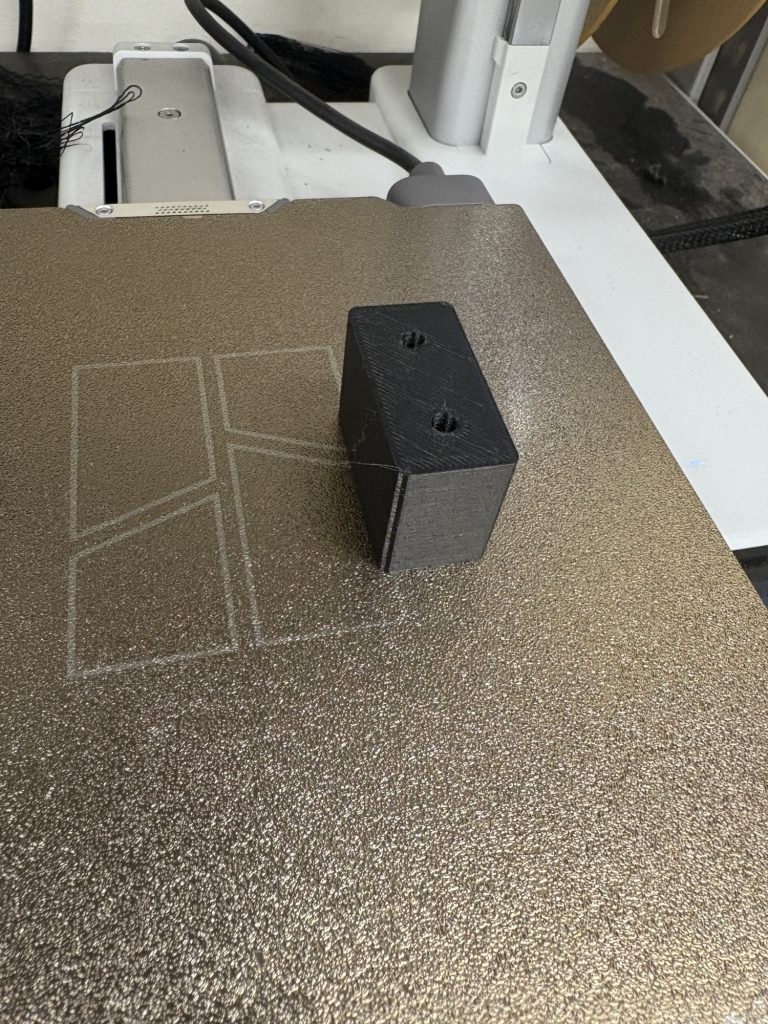
あらかじめ印刷しておいたスペーサーを挟みます。

ついでにネジが干渉する部分を切り飛ばしたリングも取り付けます
良さそうです。
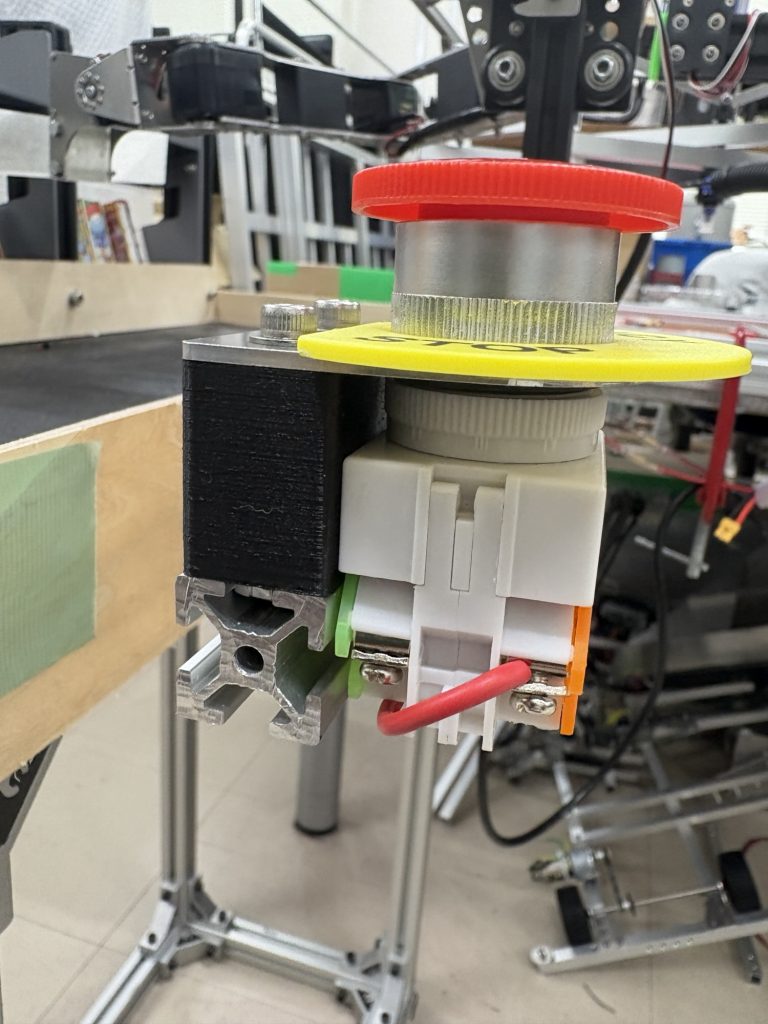
そうこうしているうちに、新たな問題を見つけてしまいました。
メインアームのZ軸がフィールド中央の屋根に干渉してます。
20mm切り飛ばせばいい話ですが、モーターの角度や、重力と釣り合わせるための定重バネが厄介です。
とは言っても、致命的なので手間をかけてでもすべき作業です。
今すぐ取り掛かりたいところですがタイムアップ。
合宿の集合時間です。
15:15~16:20
1時間でZ軸問題をどうにかします。

外しました。
大変でした。

切りました。
全てはこの1太刀のためです。
さて、最難関。
定荷重バネの取付けです。
引っ張りながらネジを締める…なんて曲芸をやってのける必要があります。

やってやりました
無事、屋根下を通過できるようになりました。

スレスレです(3mm)
とりあえず完了したのでメインアームからサブアームにお菓子を受渡す機構を考えます。(本題)
いろいろ考えましたが、機構の形が見えてきません。
ここら辺にサーボを配置すれば…等々考えていたら時間に。
20:45~22:00
こんな時間まで作業できるって合宿の醍醐味じゃないですか?
頑張ります。
必要な板を切り出します
完成図が自分の中で不鮮明なことが一番の気がかりです。
パーツを切り出します

タップ掘ります。
この作業、地味に時間使う上に失敗する(折れる)可能性があるので、あまり好きじゃないです。

途中まで組んでみました
嫌な予感がします

メンテナンス性が…
解決策はいくつかありますが、そんなことより機構として実現できるかどうかが重要です。

追加で必要な部品を探します。
ありませんでした。
追加パーツのデータを作ります。

モデリングしました
切削します。

ひとつ前に完成していた部品を処置します

処置しました。
綺麗なパーツに仕上がりました。

途中まで組み付けました。
なんかかっこいい

もう1つの部品も完了したようです。
組付け…

先端に取り付けるパーツのネジ頭が干渉します。
問題が把握できたことを収穫だと捉えて今日の活動は終了します。
おやすみなさい
おはようございます
2日目の朝です。
5時くらいに作業するか迷いましたが2度寝しました。
7:00~9:00
朝採れパーツを組込みます。

昨日の問題はスペーサーで板を浮かせることで解決しました。

追加の部品を生成します。

組付けます。
パスされる時はアーム中間関節が手前側に来ているのに、設置する時は奥側に来ています
これは制御、どうなるんだ…?
不穏な空気を感じます。

とりあえず、パス機構の試験作ができたことを喜びましょう。
実験します。
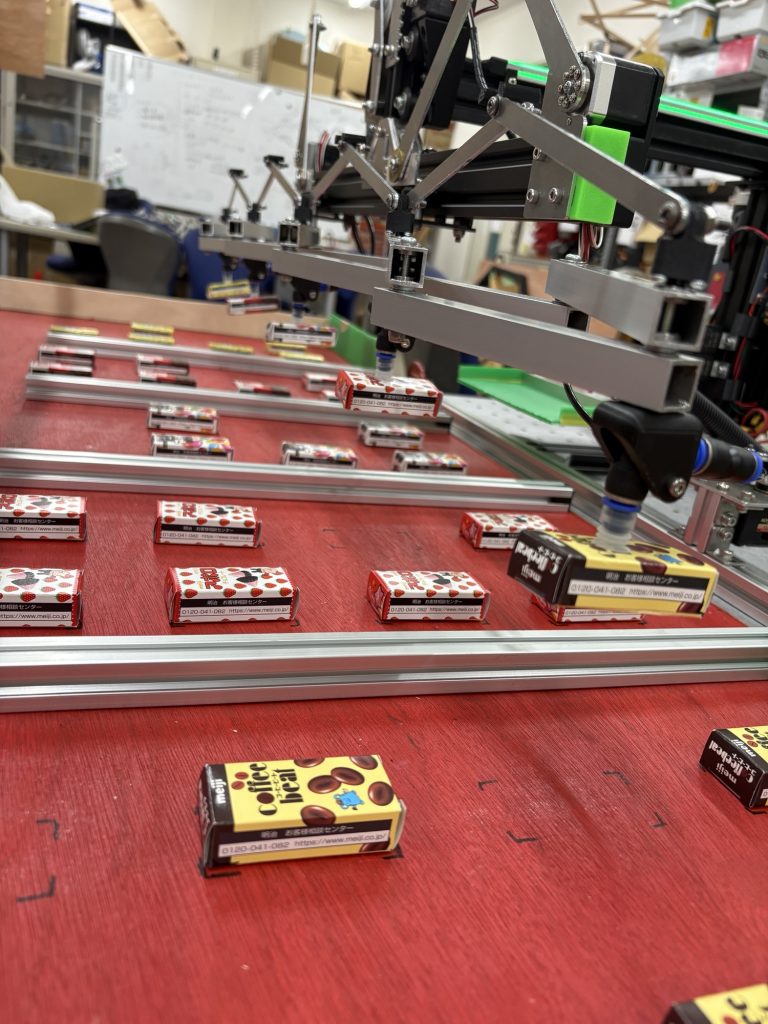
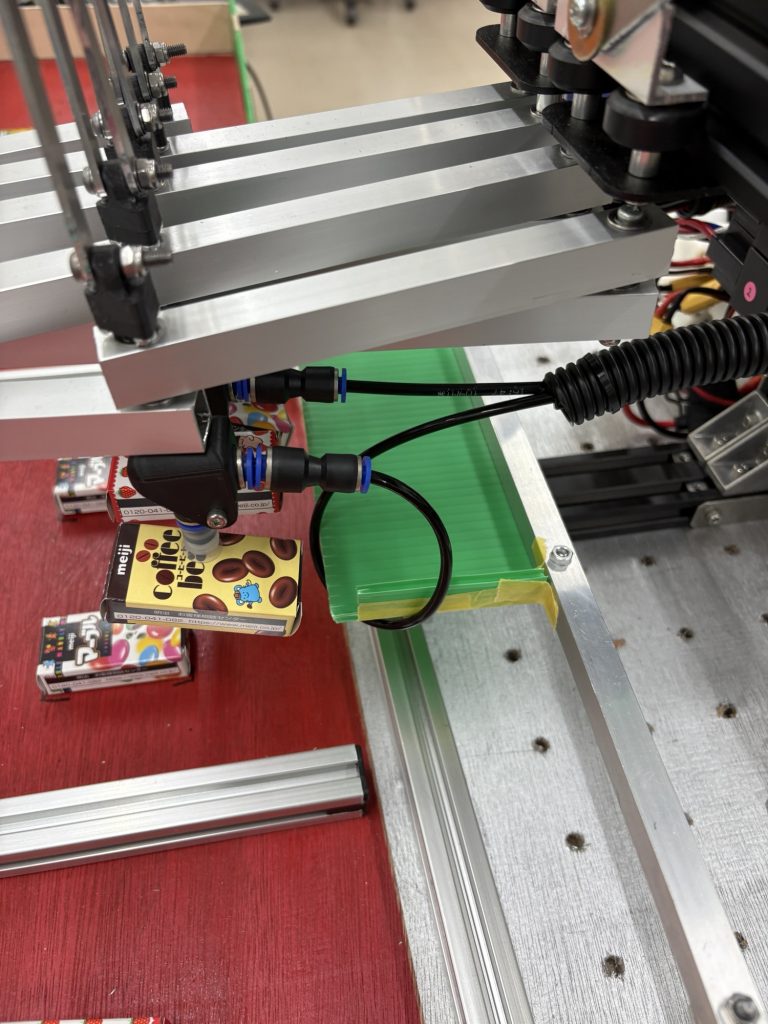
①各種類1つ計5つのお菓子を吸着します。
②中央に折りたたんで寄せます。
③全体を後ろ側に動かして、パス機構の真上にお菓子がくるようにします。
④パス機構の上にお菓子を落とします。

⑤パス機構を180°回転させます。

⑥慣性と遠心力で良い感じにサブアームにパスします(?)

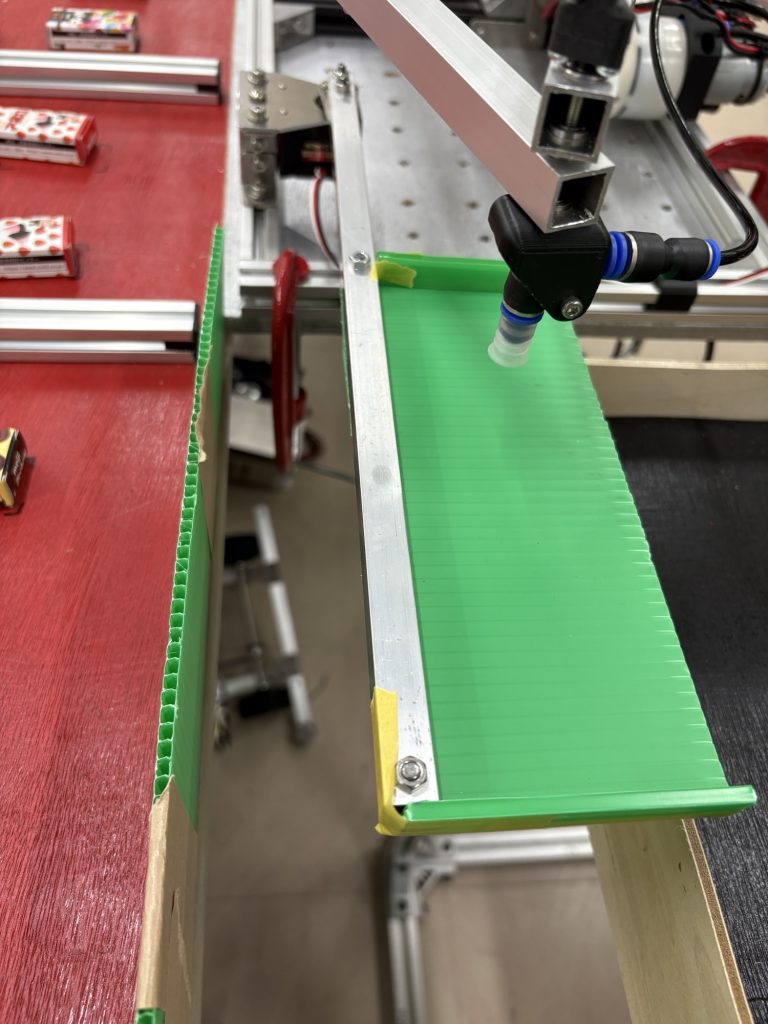
⑦サブアームが陳列棚にお菓子を置きます。

⑧立てます。
途中、怪しい工程がありましたが、全体的な流れは悪くないと思います。
パス機構の配線をします。

コネクタを圧着します。
この作業、楽しいので暇な人はやってみてください。
結線完了しました。
次にサーボの設定をします。
原点を合わせたら、次はプログラミングです。
ここで時間。
13:30~14:50
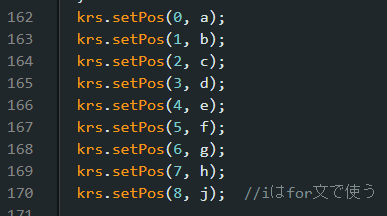
8番サーボを追記します。
ライブラリに甘えたコードなので簡単です。
a〜jの値をloop内で更新することによって角度を変更します。

コントローラーのここを操作に割当てます。
角度はこれから詰めます。
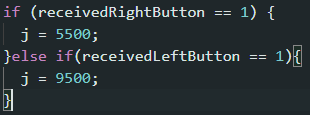
動かしてみると角度が浅く、動きが想定と逆だと判明しました。
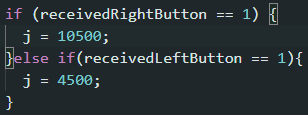
修正しました。
オーバーラン気味です。
修正します
2,3度修正した結果、最適な角度を見つけられました。
初期値も同様に調節します。
↓初期状態

↓右ボタン

↓左ボタン
よさそうです。
それでは、実験してみます。
掴んで寄せるタイミングでチューブが引っかかりますが見なかったことにします。

受渡してーーーー

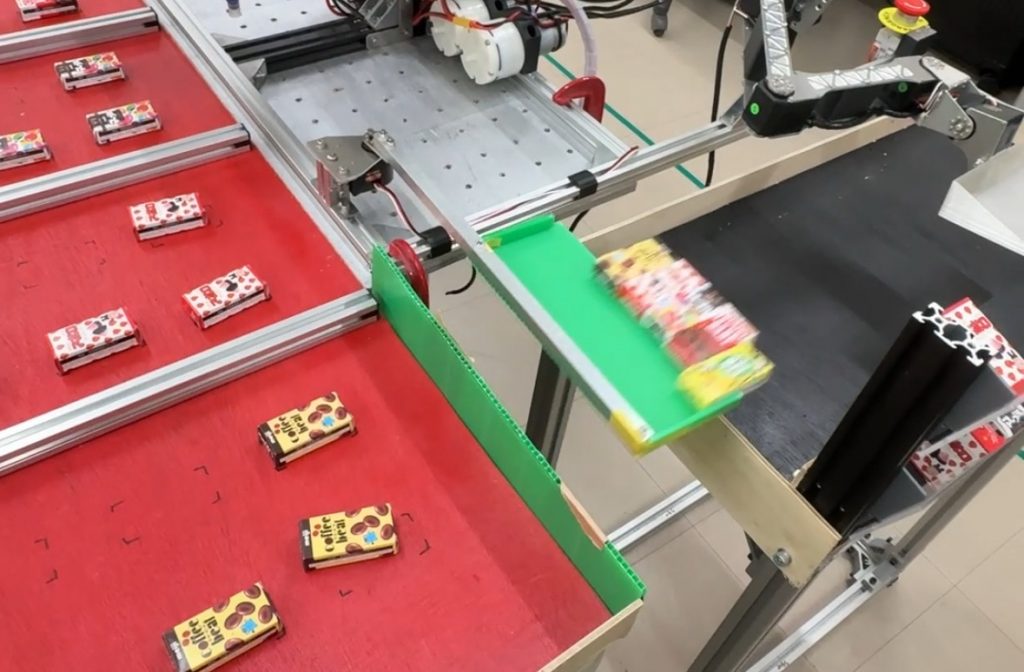
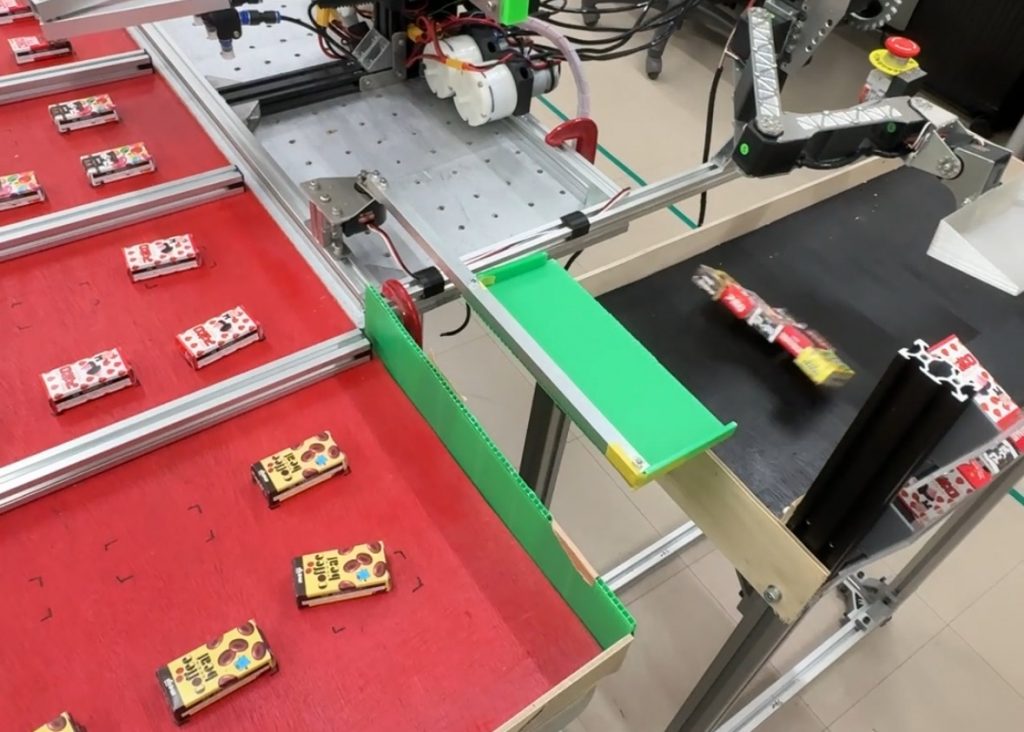

いぃぃぃいいいや滞空姿勢が素晴らしく美しい!
実験は成功です。
この状態だと、ボーナス得点は無いものの得点としては確実に認められます。
サブアームの制御は間に合いませんでしたが、私はこの合宿を通じて、得点能力を持たないアルミの塊に命を吹き込みました。
まさに歴史的瞬間です。
間に合ってよかった…
この記事で皆さんに成功を報告できて嬉しいです!
今後はボーナス得点獲得のため、サブアームの制御を進めつつ、問題点を潰していきます。
ここまで読んでくださりありがとうございます。
またいつか。