
本日はX軸とY軸の完成を目標とします。

現在はZ軸のレールがついている状態です。
それでは、作業開始。
まず、Y軸のレールを調達します。
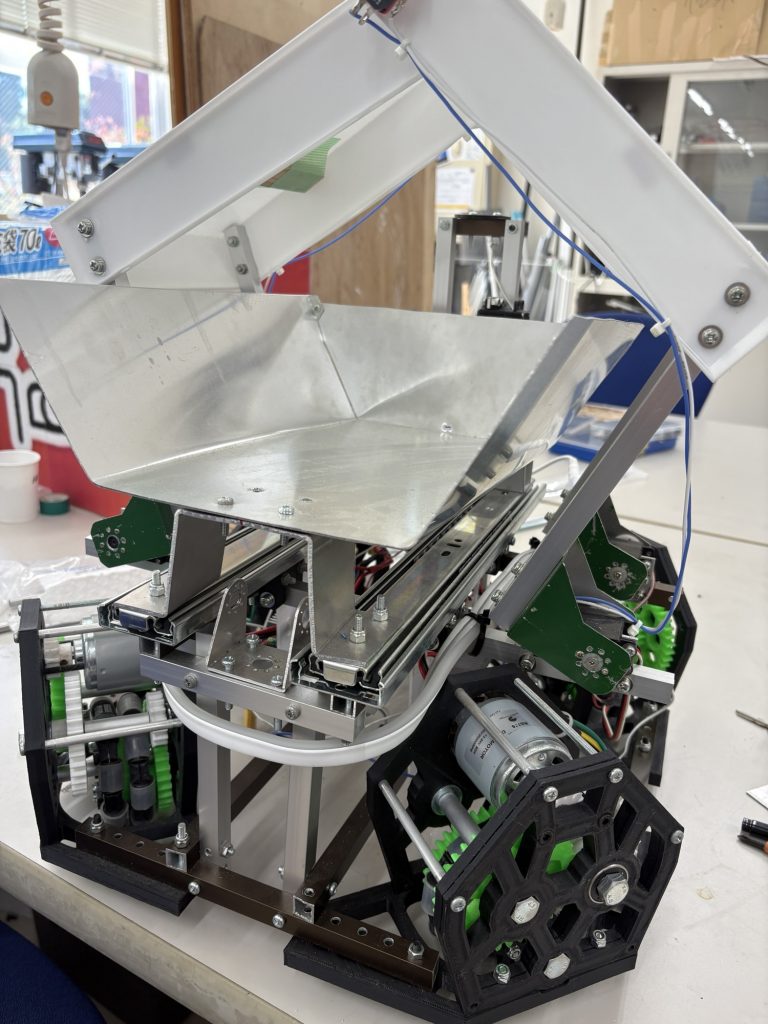
多段伸縮を実現したいので過去のロボットからレールを回収します。
このロボットは2024年の九州夏ロボコンで「アイデア倒れ賞」を獲得しています。
私が大学に入学する前から自宅で製作に着手していた思い入れのある機体です。
それでは、一部解体します。

とれました。

見た目を整えたので、元の場所に戻します。
レールをCADにおこします。
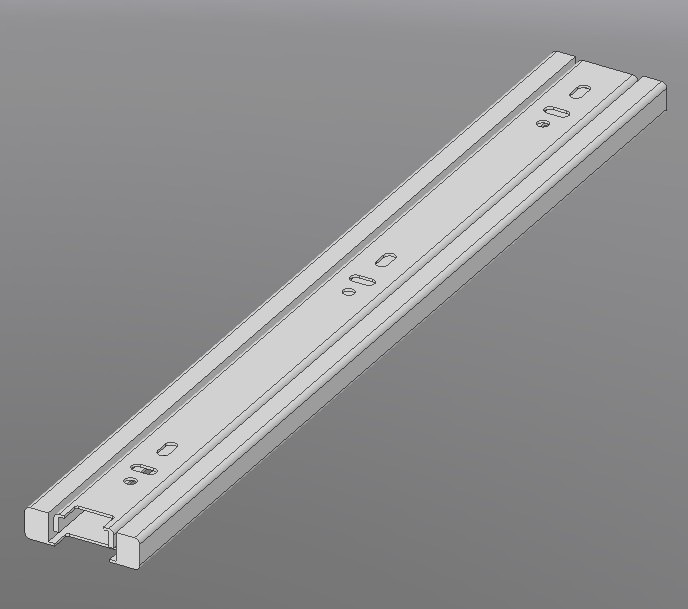
完了しました。
次に、使うモーターを選定します。

こちらのモーター、ギア比以外は完璧です。
少し改造します。

分解すると、3段の遊星歯車がでてきます。
このうち初段を抜きます。
すると、内歯の付いた円筒が長すぎるので旋盤で適切な長さに整えます。
-6.5mmでちょうど良さそうです。

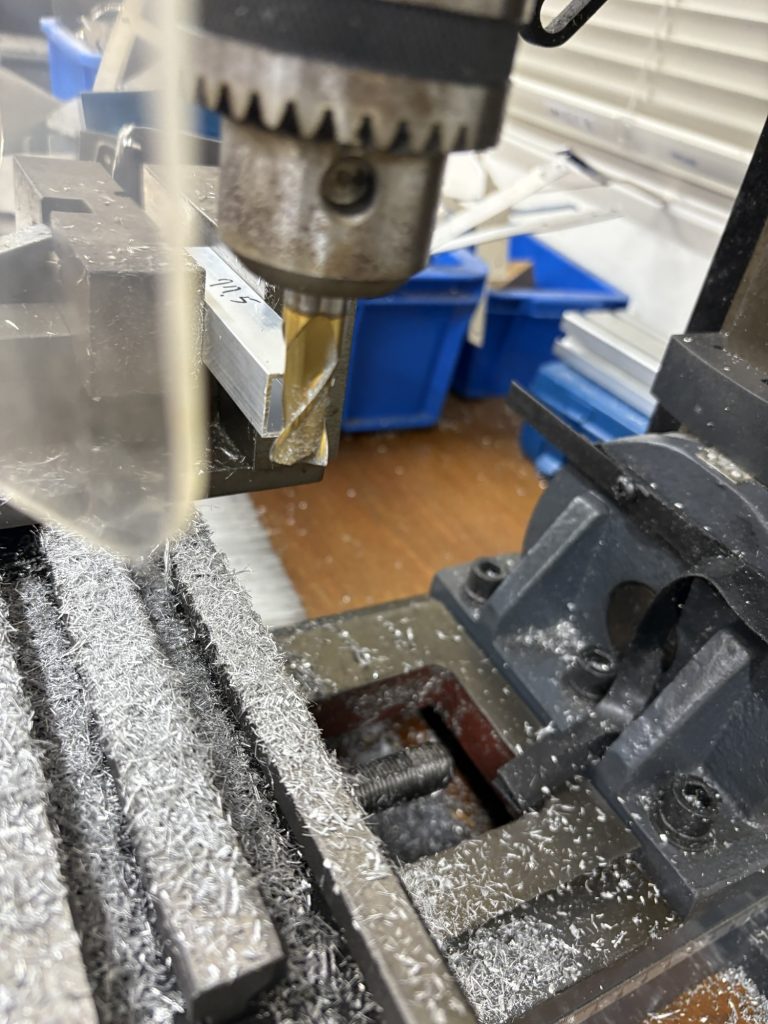
工場棟(10号館)で加工します。

こちらの旋盤を使います。

削りました。

バリ取りをして組み付けます。

完成です。

比較すると、ギアベッドの部分が少し短くなっているのがわかるかと思います。
実際に回してみると、程よく速い回転数でした。
計測すると
【変更前】78rpm
【変更後】412rpm
こちらをロボットのX軸の動力とします。
X軸、やっと設計が固まってきました。
作ります。
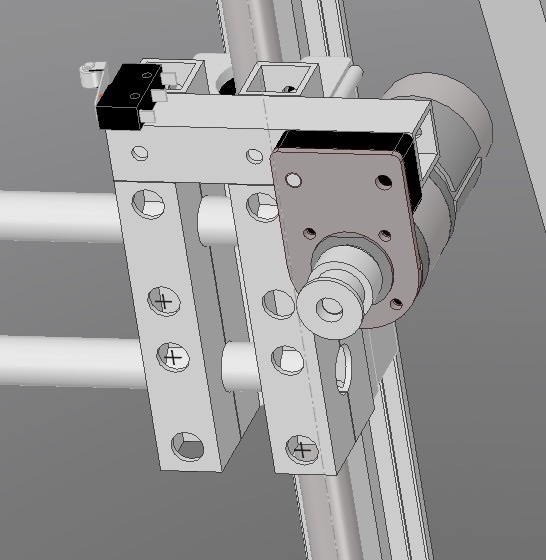
穴が沢山あるので大変です。
まずは材料を切り出します。
これだけです。

切りました。
穴をあけます。
失敗した時のリスクを考えて難しい加工から行います。
エンドミルで丸棒をおさえる窪みを切削します。
原点合わせで角パイプの端面を使います。
さらに送り量は側面の簡易定規を読みます。
これは精度が怪しい。
とりあえず2組作ってみます。

だめです。
上の穴が0.5mm程度ズレています。
やはりこの手法には無理があるようです。
ということで、設計を変更します。
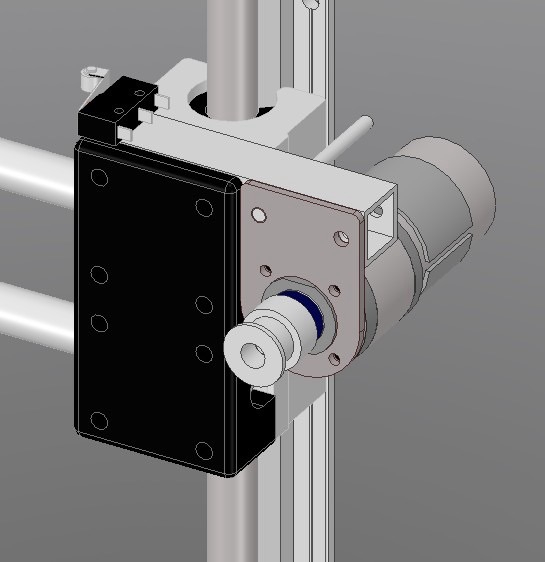
変更しました。
あまり美しくありませんが、3Dプリンターのパーツで押さえつけるようにしました。
これで一定の精度は保証されます。
しかしパーツの大きさと壁面数、密度が印刷時間を圧迫するため、本日の活動で取り付けることは厳しくなりました。
3日目の活動を終了します。
悔しいですが、目標達成ならず。
とは言っても、モーターのギア比を変更するなど大きな収穫もありました。
明日までに設計を完璧にしたいものです。

印刷中の部品を横目に。
それでは、またいつか。