
昨日、ロボットの足回りを製作しました。
前回の内容↓↓↓

上に載る機構も、そこそこかっこよくなりそうなので勢いで作ってしまいましょう。
まず現状はこちらです。

今日の目標はZ軸のレールの取付けです。
それでは作業開始!
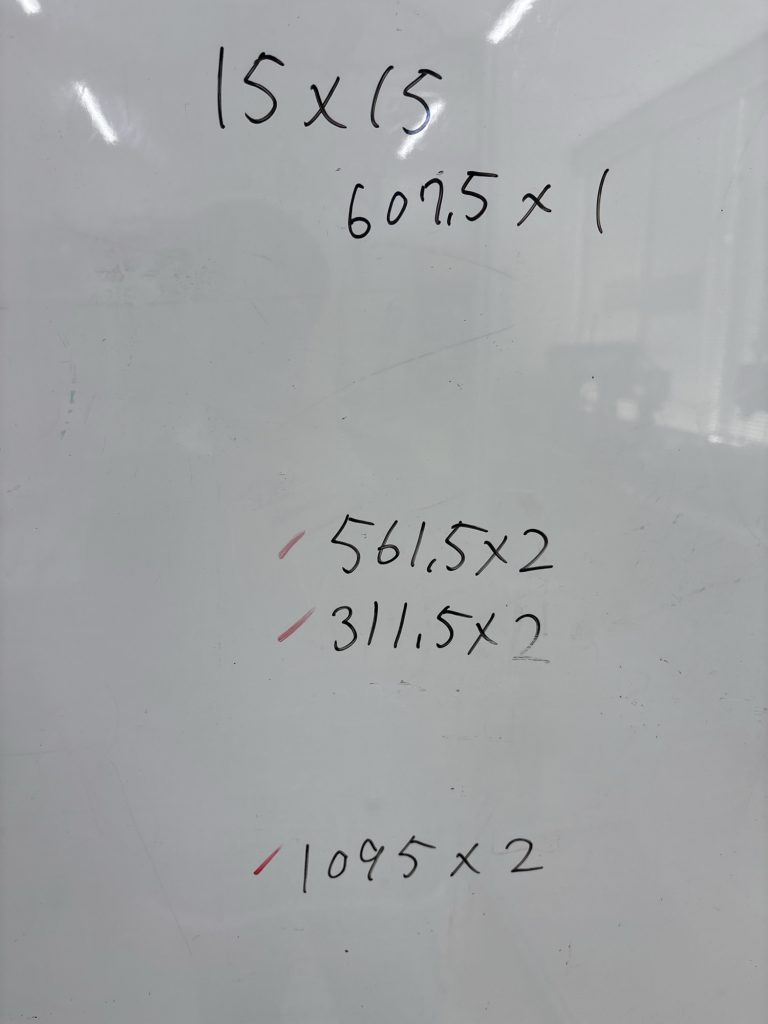
昨日の切り出しでほとんど部品は揃っています。
追加の1本切断します。
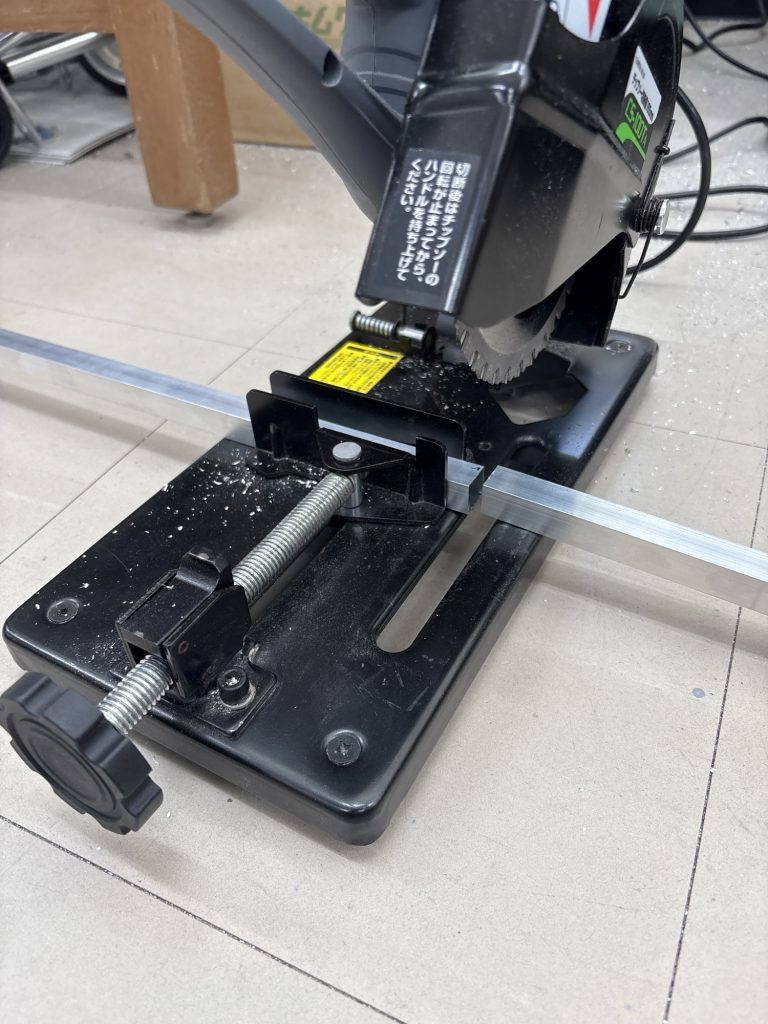
切りました。
次は穴あけです。

こちらのレールと角パイプに加工します。

一通り加工しました。
最後の穴あけは少し特殊です。
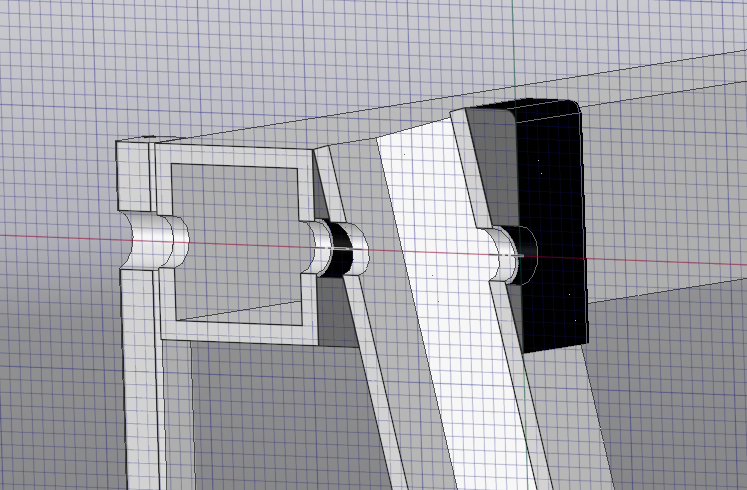
画像の右側、角パイプに対して斜めに穴があいています。
初の試みですが、上手くいけば非常に美しい仕上がりになりそうです。
頑張ります。

加工用の治具を3Dプリンターで印刷します。

はめます。

フライス盤にクランプします。

エンドミルの位置を合わせます。
この状態で真下に切削すると…
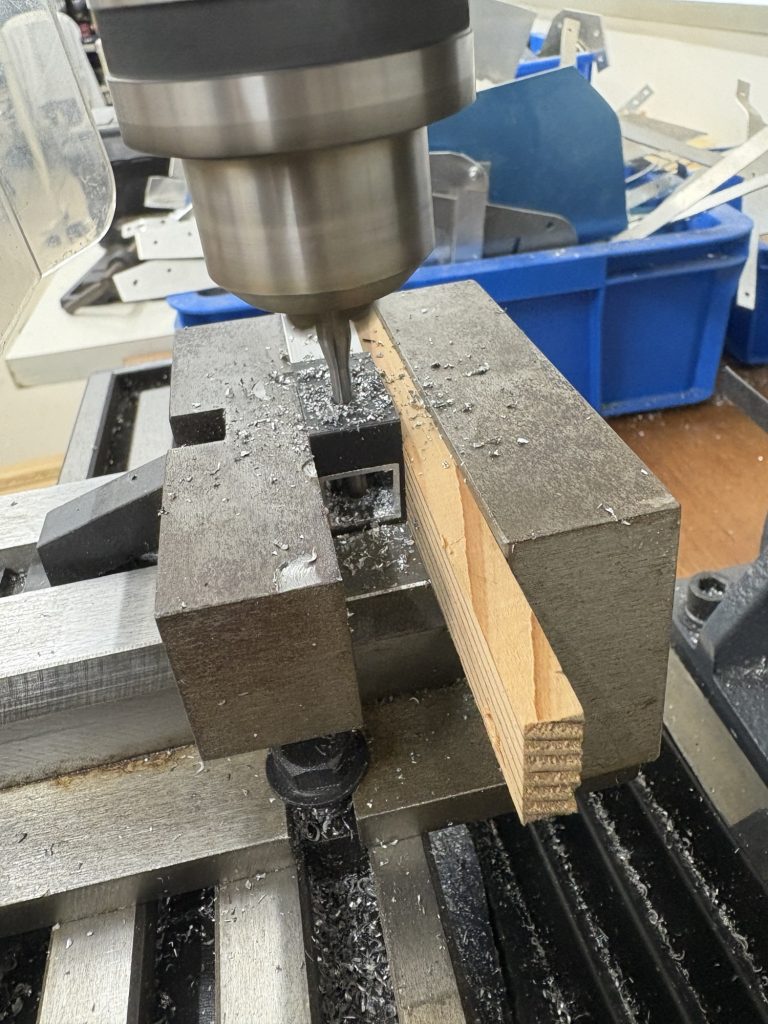
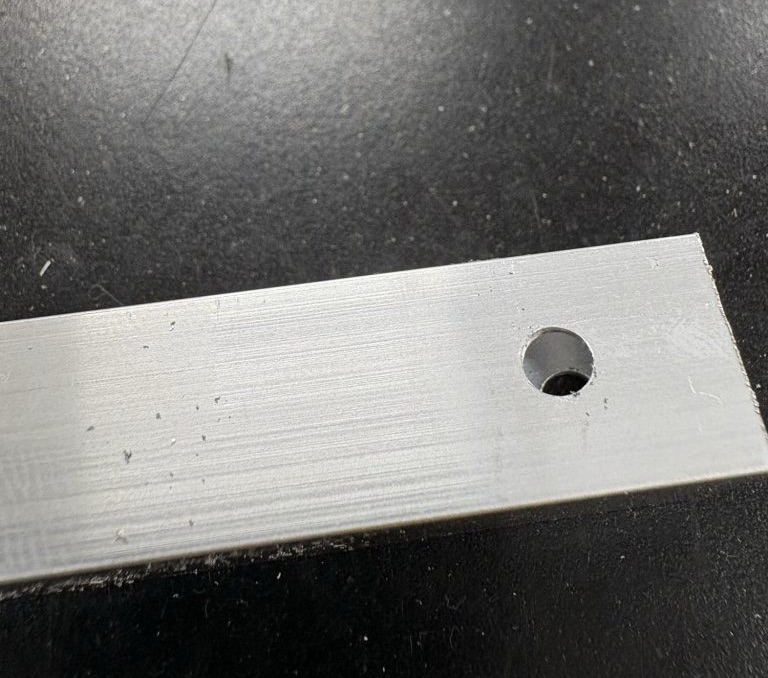
斜めに穴があきました!
精度は怪しいですが、想定通りに近い仕上がりです。
組み立てを始めます。

箱型になりました。

一気にレールを組付けました。
ロボットの背が高くなると写真の背景に困りますね。
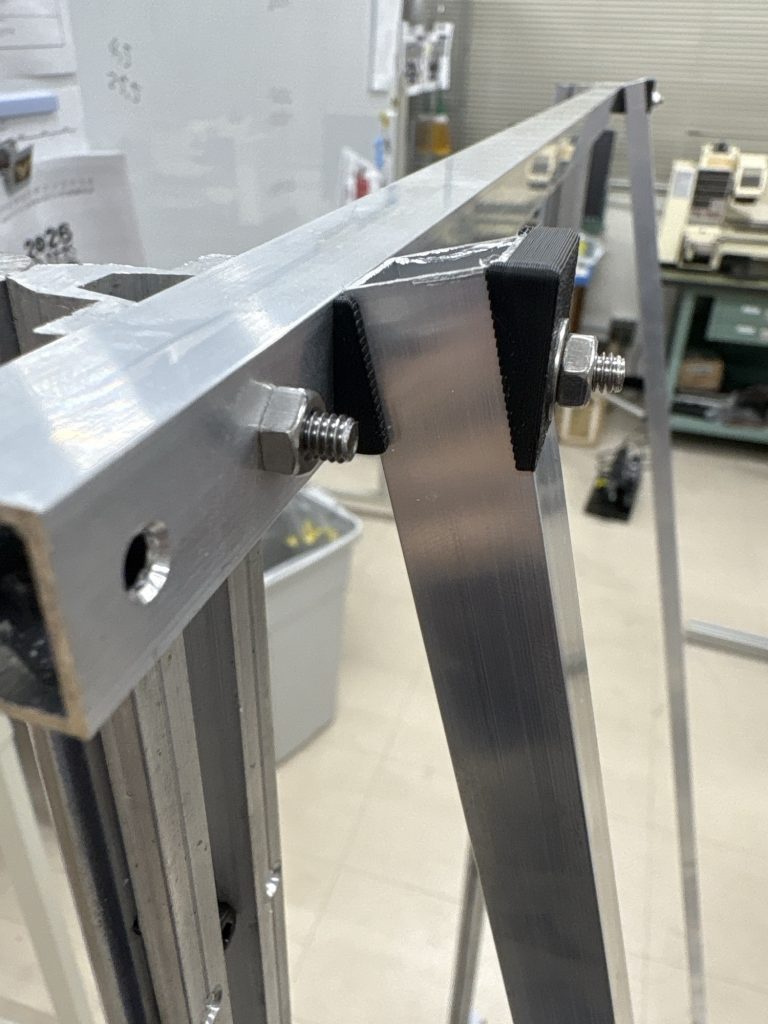
斜めにあけた穴の部分も完璧です。
かなりスマート。

緊急停止ボタンも取り付けました。
回路関連のパーツですが、後から取り付けようとすると困ることが多いので早めに搭載。
現在切り出しているパーツは全て組みました。
時間に余裕があるのでZ軸を駆動させるモーターも搭載します。
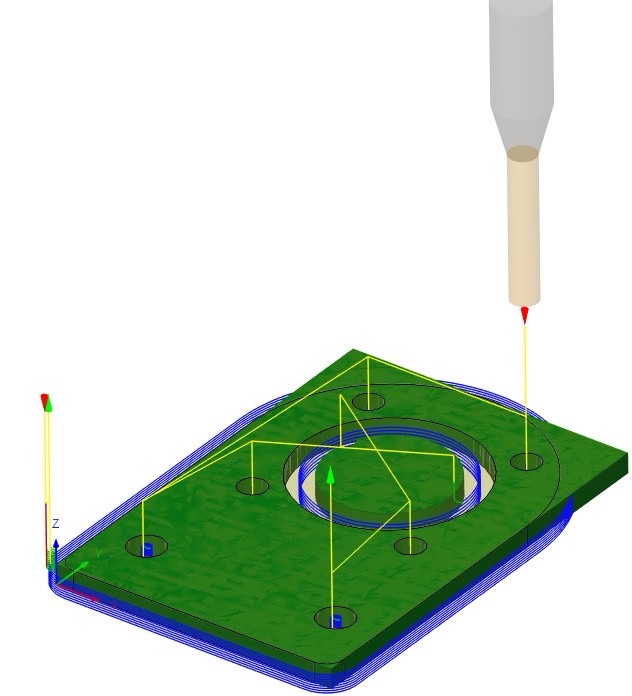
切削データを作ります。
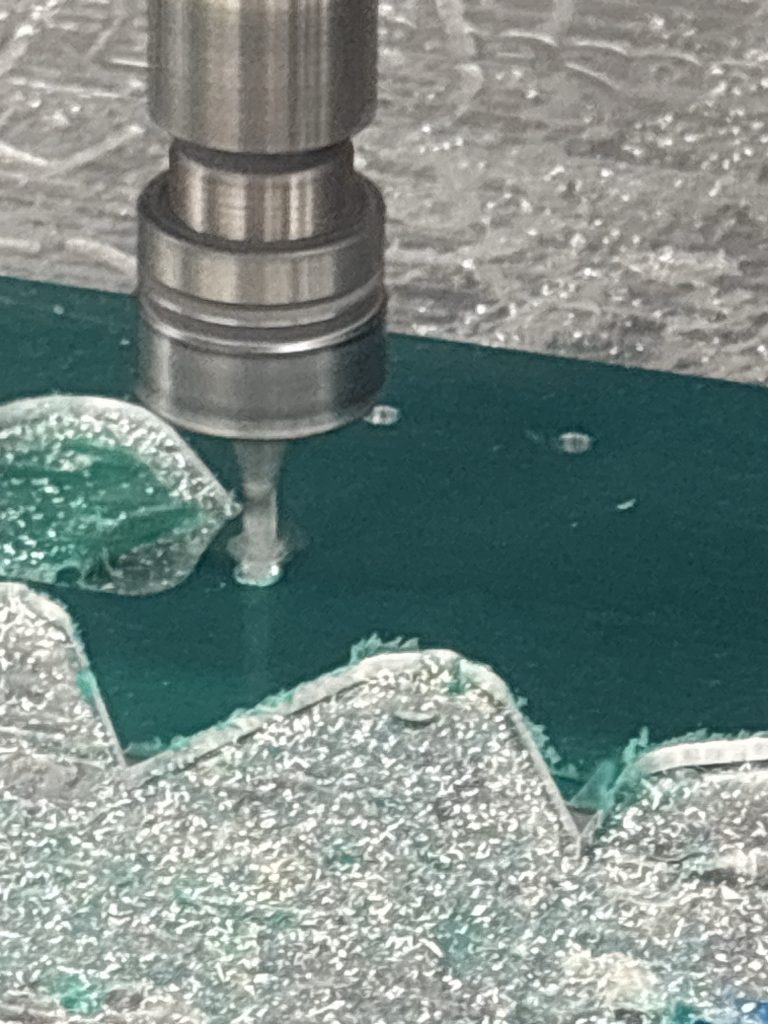
CNCに加工してもらいます。
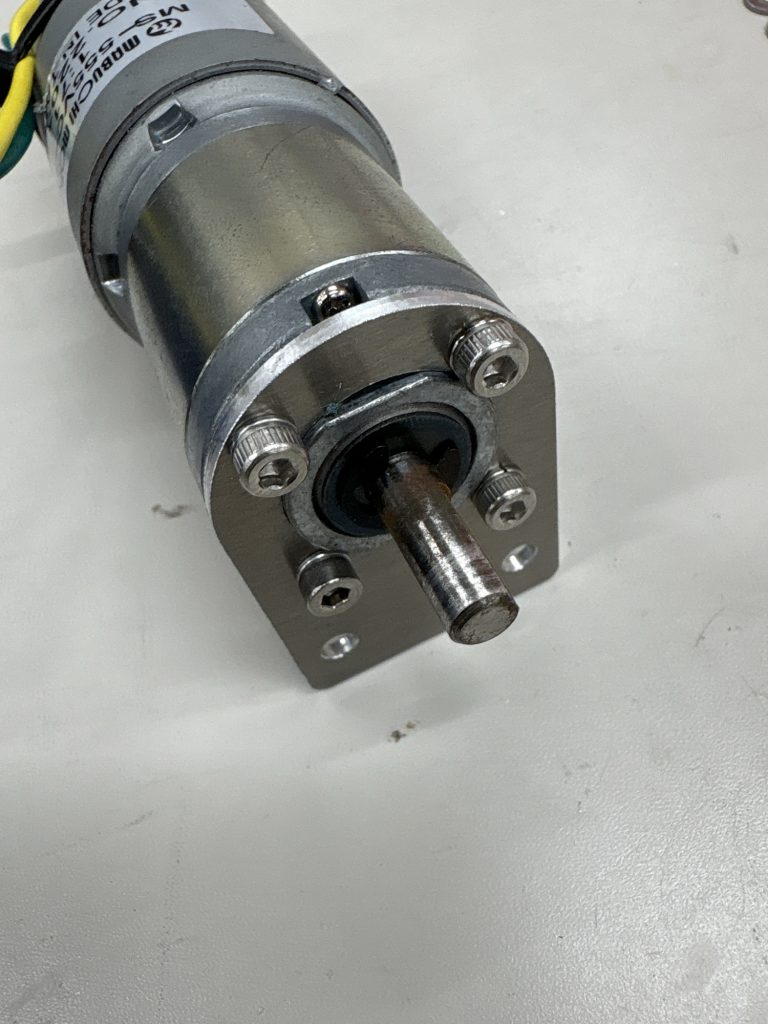
今のうちに、モーターへ配線をはんだ付けします。


モーターの配線は、黄色と緑。
どこか安心感があります。
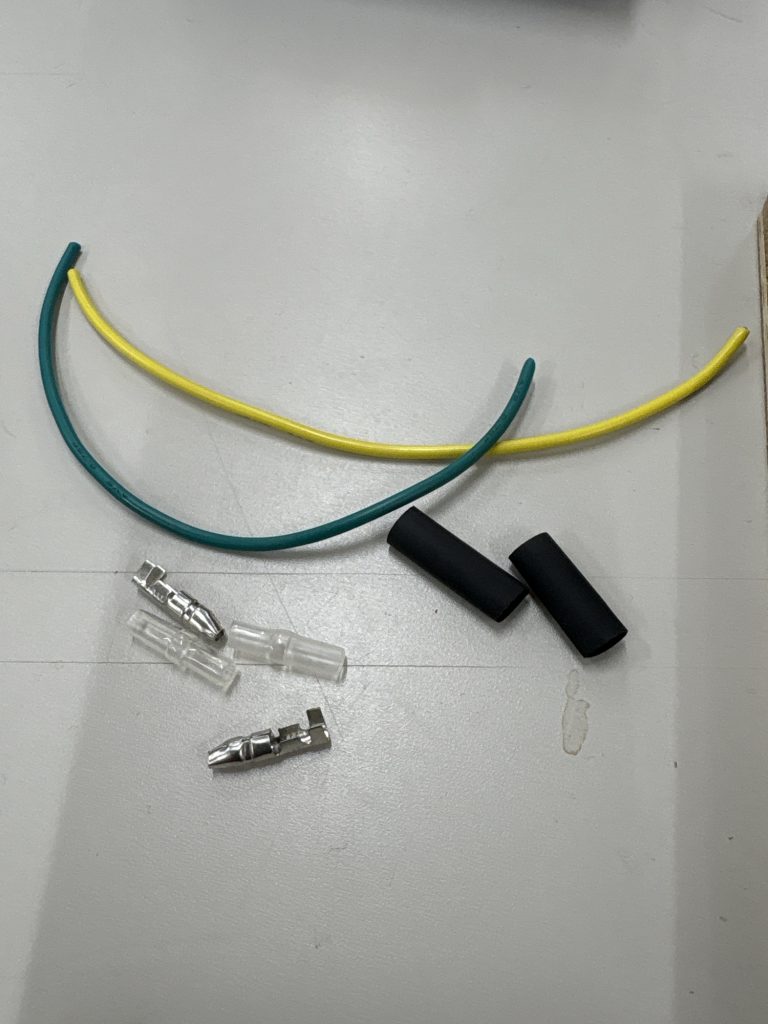
材料をそろえました。
ア レ コ レ します。

完了しました。
切削パーツが完成したので処置します。
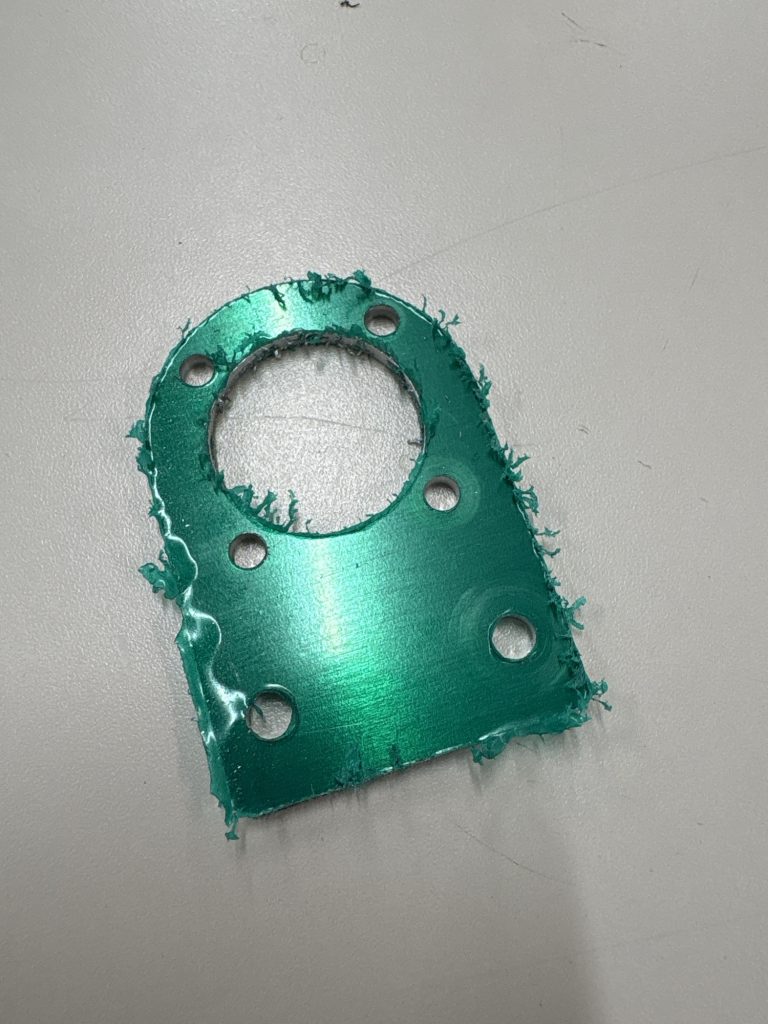

完了しました。
組み付けます。
アルミ板のパーツってかっこいいですよね。
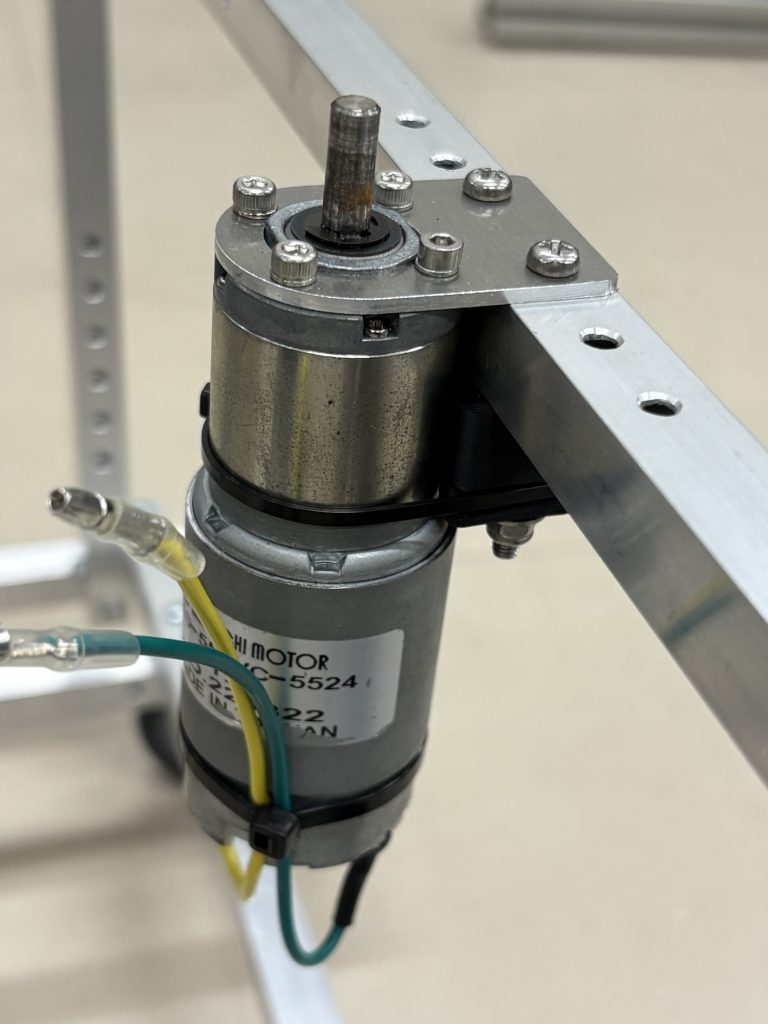
つきました。
板は弱い方向があるので、それっぽい対処をしました。結束バンド便利。
今日の活動はこれくらいにしようと思います。
最後に全体像を。

ここからが勝負ですね。
それでは、またいつか。